Language
日本語
English
Chinese
Deutsch
Korean
Vietnam
事例紹介・動画
マルチカプラ 接続確認タイプのご紹介
センサによりマルチカプラの接続を確認!
温調機とのインターロックで、温調水モレを防止できます。
射出成形機用/ダイカストマシン用
形式:JMC/JMD
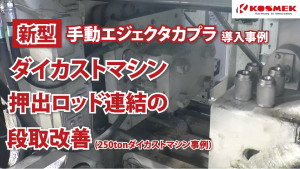
【新型】手動エジェクタカプラによる押出ロッド連結の段取り改善
ダイカストマシンの押出ロッドと押出プレートの連結を工具レスでワンタッチ連結。機内での危険な締付作業が不要となり、段取り時間も大幅削減。
ダイカストマシン用
形式:PMH
マニュアルロボットハンドチェンジャー Yamaha Motor Cobotへの取付事例
コスメックのマニュアルロボットハンドチェンジャー(Model SXR0070)は、ヤマハ発動機株式会社製の協働ロボット Yamaha Motor Cobot (型式:YC01300)に直接取付可能です。
FA・産業用ロボット製品
形式:SXR
無線センシングクランプのご紹介
無線通信でリリース動作を検知可能な、無線センシングクランプのご紹介です。
クランプへの電源供給は不要で、弊社従来式のエアセンシングクランプと異なり、動作確認用のエアが不要となり、ジグのポート(回路)数を削減できます。
工作機械ジグ関連機器
形式:LGM、LHM、LJM、LKM、LLM、WCP、WHP、YWA、YWB
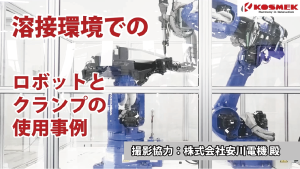
ロボット溶接環境でのクランプの使用事例
ロボットで溶接するワークのクランプに、角形クランプ (Model WHC/WCC/WFC)を使用した事例です。
協力:株式会社安川電機 殿
FA・産業用ロボット製品
形式:WHC、WCC、WFC
ワークサポート提案 ジグ・設備のコンパクト化に
ハイパワーエアワークサポート (model WNC)の活用事例です。 ジグ・設備のコンパクト化、ダウンサイジング化の事例で、ネジ締めで加わる負荷に対してワークサポートで強力に支えることで、他の直動シリンダ(アクチュエータ)を小型化できジグ全体をコンパクトにした事例です。
撮影協力:ダイドー株式会社殿
FA・産業用ロボット製品
形式:WNC
今ある設備をそのままに 人からロボットへ置き換え事例
ロボットによるワークセッティングを導入したとしても、小ロット品は人手による対応が必要。人作業時にロボットを退避させると、再設置の段取り替えが大変になる。パレットクランプによる高精度連結機構により、ロボットの簡単・高精度な位置決めを実現し段取り負担を解消した事例です。
FA・産業用ロボット製品
形式:WVS
パレットグリッパのKawasaki RS007Lへの導入事例
パレットグリッパ(Model WVA)を川崎重工業製 RS007Lへ導入した事例です。サイドアプローチ式により、上部の干渉を気にせずパレットを搬入出可能です。
FA・産業用ロボット製品
形式:WVA
メカ式ロボットハンドチェンジャー IXA-4NSN3015への取付事例
メカ式ロボットハンドチェンジャー (Model SMR)の、IAI製 スカラロボットIXA-4NSN3015へ導入した事例です。
ロボットの力でツールの着脱を行いますので、エア源は不要です。
撮影協力:株式会社IAI殿
使用ロボット:IXA-4NSN3015
FA・産業用ロボット製品
形式:SMR
負圧セーフティバルブのご紹介
吸着ハンドのワーク落下防止に最適!
停電等により元圧が断たれても、負圧状態を保持し安全です。
FA・産業用ロボット製品
形式:BWF
ベンディングロボットシステムにロボットハンドチェンジャー導入事例
連結時にガタなし、位置再現精度3μm!
ベンディングロボットの『ハンドの自動交換』に、コスメックのロボットハンドチェンジャーが導入されています。
撮影協力:村田機械株式会社殿
プレス機械用
形式:SWR
メカ式ロボットハンドチェンジャーのDOBOT製ロボットへの取付事例
メカ式ロボットハンドチェンジャー (Model SMR)を、DOBOT製 協働ロボット CR16へ導入した事例です。
ロボットの力でツールの着脱を行いますので、エア源は不要です。
FA・産業用ロボット製品
形式:SMR
三起精工製CFRP成形プレスへの金型交換システム導入事例
コスメックの金型交換システムが、三起精工製CFRP成形プレス機に採用されています。
(MF-TOKYO2025出展品)
撮影協力:三起精工株式会社殿
プレス機械用
形式:MR□、RQA、GBB、GA
メカ式ロボットハンドチェンジャーの手動交換対応タイプ(特殊対応事例)
メカ式ロボットハンドチェンジャー(model SMR)を、手動交換にした特殊対応事例のご紹介です。
短時間で高精度にハンド交換が可能で、電極の取付けも可能です。
撮影協力:しのはらプレスサービス株式会社殿
プレス機械用
形式:SMR
プレス間搬送ロボットへのメカ式チェンジャー導入事例
コスメックのメカ式ハンドチェンジャーは連結部にガタがなく、位置再現精度3μmのため、ロングアームでも先端の位置ズレが極小です。
撮影協力:しのはらプレスサービス株式会社殿
プレス機械用
形式:SMR
完全自動曲げシステムにロボットハンドチェンジャー採用!(MF-TOKYO2025出展品)
連結時にガタなし、位置再現精度3μm! プレスブレーキへの板材の搬送ハンドの交換に、コスメックのロボットハンドチェンジャーが採用されています。 撮影協力:株式会社吉野機械製作所殿
プレス機械用
形式:SWR
プレス金型オートクランプ レバースペーサタイプ採用事例
プレス機の上型/下型両方にレバースペーサタイプの金型オートクランプを採用いただいた事例です。 レバースペーサタイプの採用により、金型取付板厚さ最大20mmのバラツキに対応できます。
プレス機械用
形式:GBC-F
プレス金型オートクランプ レバースペーサタイプ採用事例
プレス機の上型/下型両方にレバースペーサタイプの金型オートクランプを採用いただいた事例です。 レバースペーサタイプの採用により、金型取付板厚さ最大20mmのバラツキに対応できます。
プレス機械用
形式:GBC-F
からくり動作でタクトタイム減!スマートシリーズ方式の紹介!
動力源不要のスマートシリーズ方式でタクトタイムの45%減少に成功する事ができました。
FA・産業用ロボット製品
形式:KSL,KSS
センタープルバック導入事例
エジェクタプレートとの連結を自動化
フローティング機構付
金型のズレにならって、負荷を受けず、高い耐久性を実現!
射出成形機用
形式:PMD
フォーマー加工後の打痕傷防止!自動搬送システム「ハンド自動交換」
人の手が介在せずにフォーマー加工後の製品の搬送から梱包までをロボット1台が自動でハンド交換することで実現しています。
撮影協力:株式会社阪村機械製作所殿
FA・産業用ロボット製品
形式:SWR
射出成形機用 金型エアクランプのご紹介(Model HC)
・高い締付力
・回転機構で安定した動作
・エアでクリーン
・竪型成形機にも最適
射出成形機用
形式:HC
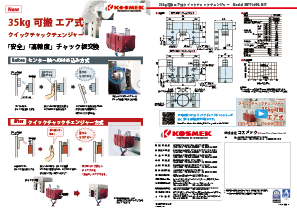
35kg可搬 エア式 クイックチャックチェンジャー
エア式クイックチャックチェンジャーの使い方や特長が良く分かるデモ機動画です。
射出成形機用
エア式クイックチャックチェンジャー
35kg可搬 エア式 クイックチャックチェンジャー
チャック板を取出機側にあずけることができるため、ロック・リリースのエアバルブ操作とチャック板の取付・取外しを分けて行えます。重いチャック板を両手を使って搬送できるため安全です。
射出成形機用
エア式クイックチャックチェンジャー
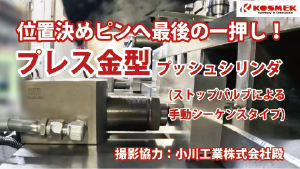
プレス金型プッシュシリンダ(ストップバルブによる手動シーケンスタイプ)導入事例
位置決めピンへ最後の一押し!
シリンダ固定後、任意のタイミングで金型のプッシュが可能な手動シーケンスタイプです。
ストップバルブでプッシュシリンダの飛出量の微調整が可能です。
撮影協力:小川工業株式会社殿
プレス機械用
プレス金型プッシュシリンダ(ストップバルブによる手動シーケンスタイプ)
プレス金型プッシュシリンダ(ハンドバルブによる手動シーケンスタイプ)導入事例
位置決めピンへ最後の一押し!
シリンダ固定後、任意のタイミングで金型のプッシュが可能な手動シーケンスタイプです。
ハンドバルブのレバー操作で、容易に金型をプッシュ!
プレス機械用
プレス金型プッシュシリンダ(ハンドバルブによる手動シーケンスタイプ)
プレス金型プッシュシリンダ(自動シーケンスタイプ)導入事例
位置決めピンへ最後の一押し!
油圧1回路で、シリンダ固定→金型プッシュが可能な自動シーケンスタイプです。
プレス機械用
プレス金型プッシュシリンダ(自動シーケンスタイプ)
位置決めピンへ最後の一押し!プレス金型プッシュシリンダのご紹介
【お困りごと】金型が重くて、位置決めが大変…
【解決】金型プッシュシリンダで、位置決めピンへ最後の一押し!
プレス機械用
プレス金型プッシュシリンダ
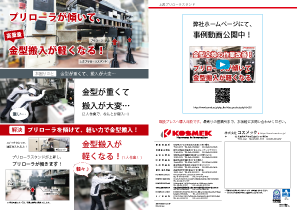
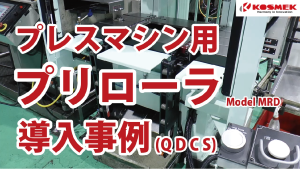
プレス金型交換作業改善!上昇プリローラスタンドのご紹介
【お困りごと】金型が重くて、搬入が大変…
【解決事例】プリローラを傾けて、軽い力で金型搬入!
プレス機械用
形式:MR□
安全・省エネ・省配線の新型ロボットハンドチェンジャー(単動式)
新型ロボットハンドチェンジャー(model STR)は、 バネロック・エアリリースで動作するツールチェンジャーで、ストッカ部でハンド交換できる安全な仕組み。バネ連結で省エネ。ロボット側のエアチューブの省配線化が可能です。
撮影協力:株式会社安川電機殿
FA・産業用ロボット製品
形式:STR
ファナック製射出成形機へのクイックエジェクタロッド導入効果
ファナック製射出成形機は、クイックエジェクタロッドがオプション選択可能です。
1. α-S50i□~α-S450i□の全機種でオプション化 (α-S15i□、α-S30i□を除く)
2. 取付工事不要 (ボルト締めのみ)
撮影協力:ファナック株式会社殿
射出成形機用
形式:PME
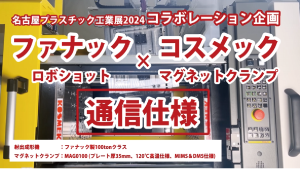
【通信仕様】ファナック製射出成形機×マグネットクランプ
ファナック製射出成形機とマグネットクランプの「通信仕様」です。
・マグネットクランプの操作が、成形機の操作パネルで可能
・成形条件に登録された金型サイズより閾値を計算し、着磁力の検定が可能
詳細は、お問い合わせください。
撮影協力:ファナック株式会社殿
射出成形機用
形式:MAK/MAG
ファナック製射出成形機とロボットを高精度ドッキング
金型段取り時やメンテナンス時に、容易に切り離しが可能!
※ロボット架台全体を連結、位置決めすることはできません。ロボット架台全体ではなく、ロボットを搭載しているパレット部のみ連結する必要があります。
撮影協力:ファナック株式会社殿
射出成形機用
形式:WVG
ロボットハンドチェンジャー 電極&エアジョイントのラインナップご紹介
コスメックのロボットハンドチェンジャーは豊富なオプション電極とエアジョイントをラインナップしています。
FA・産業用ロボット製品
形式:SWR
800tonダイカストマシンへ金型オートクランプ採用事例
コスメックの金型オートクランプはアルミ粉塵や離型剤の舞う劣悪な環境下での使用を前提としています。長寿命でメンテナンス性の良い「サステナブルな」クランプです。
ダイカストマシン用
形式:GKB
350tonダイカストマシンへ金型オートクランプ採用事例
コスメックの金型オートクランプはアルミ粉塵や離型剤の舞う劣悪な環境下での使用を前提としています。長寿命でメンテナンス性の良い「サステナブルな」クランプです。
ダイカストマシン用
形式:GKB
万能トリミング装置へのロボットハンドチェンジャー導入事例
120kg可搬ロボットハンドチェンジャーにより、「トリミング、電動ニッパー、電動ハンマー、搬送」4つのツールを使い分け!
汎用性の高い三明機工製「万能トリミング装置」をご紹介します。
撮影協力:三明機工株式会社殿
ダイカストマシン用
形式:SWL
脱着式ロボットシステムで加工機のワーク供給を自動化
使用しないときは簡単に取り外せる脱着式ワーク供給ロボットシステムでマシニングセンタ(工作機械)へのワーク供給を自動化します。ロボット台車部の脱着によって、「人による多品種少量生産」と「ロボットによる自動生産」の切り替えを簡単に実現できる、人とロボットが共存できる自動化システムです。
台車上のロボットジグの連結に、コスメックのパレットクランプを活用し高精度位置決めとクランプを行っています。 ロボットハンド先端にも、コスメックのロボットハンドチェンジャーを活用し、ハンド・ツールの自動交換でさまざまなワークや作業に対応できます。
撮影協力:筑波エンジニアリング株式会社殿
FA・産業用ロボット製品
形式:WVS/SMR
CNC旋盤自動化 コレットチャックからワーク、刃具まで全自動交換
CNC旋盤のロボット自動化事例です。加工物(ワーク)、コレットチャック、刃具まで自動段取り替えを実現するシステムです。コスメックのロボットハンドチェンジャーを活用し、必要なハンド・ツールの交換を行うことで搬送物の変化に対応します。
撮影協力:高松機械工業株式会社殿
FA・産業用ロボット製品
形式:SWR/SWL/STR
QDCS 金型クランプ導入事例 スイングクランプ
金型搬入出時に干渉のない金型クランプの
高速プレスへの導入事例です。
プレス機械用
形式:GHA、GN
マグネットクランプ 着磁力検定機能 「登録」手順編
マグネットクランプの着磁力検定機能導入事例。
「登録」手順を事例を用いて説明します。
射出成形機用
形式:MU□-K
マグネットクランプ 着磁力検定機能 「検定」手順編
マグネットクランプの着磁力検定機能導入事例。
「検定」手順を事例を用いて説明します。
射出成形機用
形式:MU□-K
メカ式ロボットハンドチェンジャー ABB GoFaへの取付事例
高速動作可能な協働ロボットABB製GoFaとコスメック製高精度メカ式ハンドチェンジャーにより、高速ハンド交換を実現!
撮影協力:ABB株式会社殿
使用ロボット:GoFa
FA・産業用ロボット製品
形式:SMR
CNC旋盤へのピックアップローダ 「ハンドの自動交換」
1台のピックアップローダで、ワークとトレーの搬送を可能にした事例です。
ピックアップローダの汎用化によりフレキシブルな生産を実現します。
撮影協力:村田機械株式会社殿
FA・産業用ロボット製品
形式:SWR
マグネットクランプ 着磁力正常性自己診断機能のご紹介
安心が増えた!
マグネットクランプの着磁力正常性自己診断機能をご紹介。
・金型毎に閾値を決める必要がない。
・合否はシステムが判断。
・作業者によるチェック不良、チェック忘れが無くなる。
射出成形機用
形式:MU□-G
マグネットクランプ 着磁力検定機能のご紹介
安心が増えた!
マグネットクランプの着磁力検定機能をご紹介。
・システムに閾値を登録しておくことができる。
・呼び出された閾値より、合否をシステムが判定。
射出成形機用
形式:MU□-K
【通信仕様】TOYOイノベックス製射出成形機×マグネットクランプ
【IPF2023:コラボレーション企画】
TOYOイノベックス製射出成形機とマグネットクランプの「通信仕様」によって、更なる「安全性」「使い勝手」の向上を実現。
詳細は、お問い合わせください。
撮影協力:TOYOイノベックス株式会社殿
※「東洋機械金属株式会社」は、2025年4月から「TOYOイノベックス株式会社」へ改称いたしました。
射出成形機用
形式:MAK/MAG、MHL、PME
【通信仕様】ソディック製射出成形機×マグネットクランプ
【IPF2023:コラボレーション企画】
ソディック製射出成形機とマグネットクランプの「通信仕様」によって、
更なる「安全性」「使い勝手」の向上を実現。
詳細は、お問い合わせください。
撮影協力:株式会社ソディック殿
射出成形機用
形式:MAK/MAG
【通信仕様】新潟機械製射出成形機×マグネットクランプ
【IPF2023・名古屋プラスチック工業展2024コラボレーション企画】
新潟機械製射出成形機とマグネットクランプの「通信仕様」によって、
更なる「安全性」「使い勝手」の向上を実現。
詳細は、お問い合わせください。
撮影協力:新潟機械株式会社殿
射出成形機用
形式:MAK/MAG
大型ロボット用ロータリージョイント(特殊対応品)
ダイカスト成形品搬送ロボットへの採用事例
手首を回してもエアチューブが絡まない!ハンド周辺の干渉回避!
FA・産業用ロボット製品/ダイカストマシン用
(特殊対応品)大型ロボット用ロータリージョイント
組立自動化事例 板金への樹脂品・ゴム品の組付け
人海戦術の組立ラインを多関節ロボット3台により自動化!
コスメックのロボットハンドチェンジャー、小型ロケートクランプは組立品が変わるときの段取時間短縮をお手伝いします。
撮影協力:株式会社伊藤製作所殿
FA・産業用ロボット製品
形式:SWR/SWQ
樹脂成形品にスイングクランプ
Model WHC
高寿命・高耐久、ストッパ・ガイド不要、簡単置き換えブラケットあり。
様々な プラスチック製品の固定に使用 されています。
FA・産業用ロボット製品/射出成形機用
形式:WHC
電動走行!電動昇降!コンパクト!無軌道台車
射出成形機の金型交換をどなたでも、安全に!
電動走行・昇降方式の無軌道台車で、軽やかに金型を運搬できます。
射出成形機用
形式:NYF
ロボットによる段ボール開梱装置
様々な段ボールのサイズを識別し、適切なカッターに持ち替えたロボットが開梱作業を行います。
撮影協力:株式会社エヌテック殿
FA・産業用ロボット製品
形式:SWR
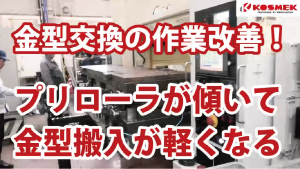
プリローラを傾けてプレス金型搬入が軽くなる
【お困りごと】金型が重くて、搬入が大変…
【解決事例】プリローラを傾けて、軽い力で金型搬入!
プレス機械用
形式:MR□
多彩なロボットハンド事例 (ロボットテクノロジージャパン2024出展品)
コスメックでは、多彩なロボットハンドをラインナップしております。
他にはない特色あるハンドを実際にロボットに取り付けた状態でご紹介いたします。
撮影協力:エプソン販売株式会社殿
使用ロボット:Epson Robots VT6L
FA・産業用ロボット製品
形式:SWR/WPT/WVA/WHC/WFC/WKH/SWP
角形ボディのエアリンククランプ退避式のご紹介
レバー退避でワーク搬入出時の干渉を回避するエアリンククランプです。
オートスイッチの取付が可能で様々な場所でご使用いただけます。
クーラント環境でも使用可能です。
FA・産業用ロボット製品
形式:WFC
角形ボディのエアリンククランプのご紹介
クランプレバーが大きく垂直回避するエアリンククランプです。
リンク部はシリンダと一体構造でコンパクトです。
オートスイッチの取付が可能で様々な場所でご使用いただけます。
クーラント環境でも使用可能です。
FA・産業用ロボット製品
形式:WCC
メカ式ロボットハンドチェンジャー Model SMR
HIWIN RA605シリーズへの取付事例
動力源不要!ガタツキゼロで高精度・高剛性
メカ式ロボットハンドチェンジャー SMR0120の HIWIN RA605シリーズへの取付事例です。
撮影協力:ハイウィン株式会社殿
使用ロボット:RA605-GC
FA・産業用ロボット製品
形式:SMR
協働ロボットJAKA Zu🄬のハンドを手動でワンタッチ交換
マニュアルロボットハンドチェンジャー(Model SXR0070)は、
JAKA Robotics社製協働ロボット JAKA Zu🄬に直接取付可能です。
撮影協力:JAKA Robotics 殿
使用ロボット:JAKA Zu🄬7
FA・産業用ロボット製品
形式:SXR
メカ動作で設備シンプル化 スマートシリーズ活用事例
動力源不要のスマートシリーズを活用し、ロボットの力や回転テーブルの力を利用してスマートシリーズをメカ的に動作させ、ワークの把持やパレットの位置決め・固定を行います。設備に供給するエアや電気配線の本数削減や可動部のエア配管をなくし自由な動作を可能にします。
撮影協力:三菱電機株式会社殿
FA・産業用ロボット製品
形式:KSH/KSL
研削研磨の自動化システム
次世代倣い制御装置(プッシュコープ)による研削研磨の自動化システム
熟練工の作業をロボットが再現!
ツールの持ちかえにロボットハンドチェンジャーが採用!
(電気・エア・クーラントの自動接続が可能)
撮影協力:愛知産業株式会社殿
FA・産業用ロボット製品
形式:SWR
卓上成形機の段取方法開発事例
ボルト締め・緩めの作業をエアクランプに置き換えることで
卓上成形機の作業負荷・時間を軽減した段取改善事例です。
設備改善、撮影協力:ヤマトモビリティ&Mfg.株式会社殿
※「ヤマト・インダストリー株式会社」は、2024年10月から「ヤマトモビリティ&Mfg.株式会社」へ改称いたしました。
射出成形機用
形式:HC
EV急速充電コネクタの接続デモ(ロボットハンドチェンジャーの活用事例)
ロボットハンドチェンジャー活用事例です。
EV急速充電コネクタ接続デモンストレーションです。ロボットにより、EV充電用コネクタを自動的に自動車に接続します。その後、ロボットハンドチェンジャーで充電ツールを切り離し、給電を継続した状態で維持でき、ロボットは別の自動車の給電や作業ができます。
撮影協力:日本航空電子工業株式会社殿
FA・産業用ロボット製品
形式:SWR
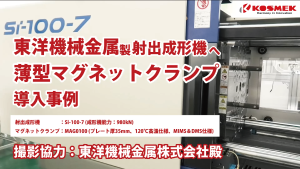
薄型マグネットクランプ 東洋機械金属製射出成形機導入事例
東洋機械金属製射出成形機への薄型マグネットクランプ導入事例です。
撮影協力:東洋機械金属株式会社殿
射出成形機用
形式:MAK/MAG、MHL、PME
マグネットクランプ 新潟機械製射出成形機導入事例
新潟機械製射出成形機へのマグネットクランプ導入事例です。
撮影協力:新潟機械株式会社殿
射出成形機用
形式:MAK/MAG
ロボット台車連結!複数工程へのロボット共用事例
ロボット台車と作業台のメカによる高精度連結により、ティーチング補正不要でロボット段替え完了します。複数工程でのロボット共用により稼働率が向上します。
FA・産業用ロボット製品
形式:WVS
クイックエジェクタロッドで重労働からの解放!
1800ton成形機のエジェクタロッド交換時間比較
一般的なエジェクタロッドでは1800ton射出成形機のロッド交換は重労働で時間もかかります。クイックエジェクタロッドにより、重労働から作業者を開放し、成形工場を働きやすい職場へ改善!
射出成形機用
形式:PME
エリートロボット メカ式ロボットハンドチェンジャー取付事例
メカ式ロボットハンドチェンジャー model SMR0120を、エリートロボット(ELITE ROBOT)製協働ロボットEC612への取付事例です。
撮影協力:エリートロボットジャパン株式会社殿
FA・産業用ロボット製品
形式:SMR
HAN’S ROBOT E03 マニュアルハンドチェンジャー取付事例
コスメックのマニュアルロボットハンドチェンジャー(Model SXR0070)は、
HAN’s ROBOT
E03/E03-Pro/E05/E05L/E05-Pro/E05L-Pro/E10/E10L/E10-Pro/ E10L-Proに直接取付可能です。
撮影協力:株式会社ジーネット殿
FA・産業用ロボット製品
形式:SXR
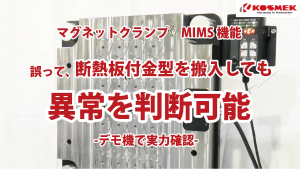
断熱板付金型を搬入しても異常を判断可能で安全!
断熱板の付いた金型を誤って搬入してしまった場合でも、近接スイッチによる金型在席確認や着磁力不足の信号により、異常を判断可能で安全!
射出成形機用
形式:MAK/MAG
異物のはさみこみを着磁力で判断可能で安全!
マグネットクランプは異物はさみこみ時の着磁力も正確に測定・数値化!
異物による着磁力減少から、異常を判断可能で安全!
射出成形機用
形式:MAK/MAG
マグネットクランプ 見えない磁力を「数値化」
デモ機を用いて、MIMSの特長を分かりやすく解説
見えない磁力を「数値化」し、操作ペンダントに着磁力を表示
全マグネットブロックにセンサを搭載し、金型サイズ違いも正確に測定
射出成形機用
形式:MAK/MAG
汎用自動セル生産|自動ジグ段取替えで実現する変種変量セル生産
「変種変量無人に対応するセル生産を構築せよ」というミッションに対応するため、
・ジグパレットの自動段取り替えで、複数工程の対応やワークの変化に対応します。
・ロボットハンドの自動交換により、搬送物に対応するハンドに交換し汎用化が可能です。
撮影協力:株式会社日進製作所殿
工作機械ジグ関連機器
形式:VS/WVS/SWR
メカ式ロボットハンドチェンジャー Model SMR取付事例
安川電機製協働ロボットMOTOMAN-HC10DTPへの取付事例です。
FA・産業用ロボット製品
形式:SMR
ツール交換で色々な作業を行えるロボット汎用化
ロボットがロボットを作る自動化工場 PART3/3
ロボットハンドチェンジャーによってさまざまなハンド・ツール交換を行い、1台のロボットで色々な作業を実施することができます。
撮影協力:株式会社ダイヘン殿
FA・産業用ロボット製品
形式:SWR
安全対策!金型オートクランプのロック確認制御
T溝自動スライドタイプのオートクランプについて、金型ロック後にエアシリンダを後退動作させることで確実なロック確認を可能にしています。
射出成形機用
形式:YMC/YMV
金型油圧クランプを一般的な工具で分解!
コスメックの油圧クランプは一般的な工具だけで分解・組立可能!
特別な技能も不要で、メンテナンス容易です。
射出成形機用 / プレス機械用
形式:GBB
搬送ハンドのコンパクト化・軽量化・内径把持を活用
ロボットがロボットを作る自動化工場 PART2/3
内径把持を行うハイパワーエアクランプを活用し、外径把持ハンドよりもコンパクト化を実現。
撮影協力:株式会社ダイヘン殿
FA・産業用ロボット製品
形式:SWE
2台のロボットがナットランナをシェア!?ビットも自動交換
ロボットがロボットを作る自動化工場 PART1/3
2台のロボットがハンド・ツールを共有しロボットを組み立てて行きます。
撮影協力:株式会社ダイヘン殿
FA・産業用ロボット製品
形式:SWQ、SWR
15kg可搬チャックチェンジャー! ボルトによる交換と比較
ボルトによる重量級(~15kg)チャック板交換に時間、労力をとられていませんか?クイックチャックチェンジャーの導入でワンタッチ、工具レス、安全にチャック板を交換できるようになります!
撮影協力:福山合成株式会社殿
射出成形機用
形式:SXQ0150(15kg可搬タイプ)
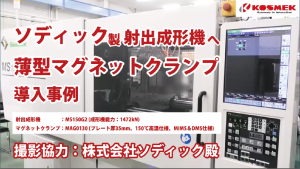
薄型マグネットクランプ ソディック製射出成形機導入事例
ソディック製射出成形機への
薄型マグネットクランプ導入事例です。
撮影協力:株式会社ソディック殿
射出成形機用
形式:MAK/MAG
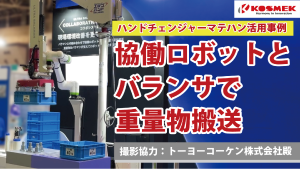
協働ロボットとバランサで重量物搬送(ハンドチェンジャーマテハン活用事例)
ロボット搬送の助力装置であるバランサ(バラマン)を付けたハンドと小型ハンドをハンド交換することで幅広いワーク搬送が可能となります。
撮影協力:トーヨーコーケン株式会社殿
FA・産業用ロボット製品
形式:SWR
ダイカストマシン用金型オートクランプ 5年使うとどうなる?
ダイカストマシン用の金型オートクランプ
アルミダイカストの現場で5年使用後の動作をチェック!
ダイカストマシン用
形式:GKB
ロボットミキシングシステム FAパレットクランプ導入事例
FAパレットクランプ導入事例
ロボットと攪拌容器を強力なクランプ力で接続!
撮影協力:OMC株式会社殿
FA・産業用ロボット製品
形式:WVG
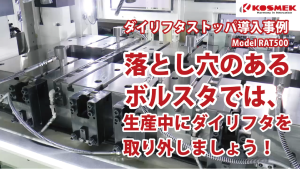
落とし穴付ボルスタでは生産中にダイリフタを取り外しましょう
ダイリフタストッパ(Model RAT)の導入事例紹介です。
生産中にダイリフタをボルスタより取り外すことで
ダイリフタへのスクラップ干渉・堆積を回避できます。
プレス機械用
形式:RA、RQA
パレットグリッパ 測定自動化・協働ロボット活用事例
パレット搬送時、高さ方向の動作を最小限にできるパレットグリッパ(model WVA)を活用し、測定機へパレットとワークを自動搬送。検査を自動化でき、段替時間も短縮します。
撮影協力:株式会社東京精密殿
FA・産業用ロボット製品
形式:WVA
測定自動化 台車段替えでワーク外段取り化
高精度位置決めできるパレットクランプ(model WVS)を活用し、
台車上のパレットを位置決め。ロボットでワークを測定機に搬送し検査を自動化・段替時間を短縮します。
撮影協力:株式会社東京精密殿
FA・産業用ロボット製品
形式:WVS、RQC
ロボットハンドチェンジャーコラボレーション企画(MECT2023出展品)
ハイウィン製ロボットに、ロボットハンドチェンジャーが採用
キラ・コーポレーション製マシニングセンタに、ツールとワークのチャッキングを行います。
FA・産業用ロボット製品
形式:SWR
1800ton射出成形機 マグネットクランプ導入事例
金型(12ton)の機内搬入~交換完了までの事例です。
射出成形機用
形式:MAK/MAG
メカ式ロボットハンドチェンジャー Model SMR取付事例
デンソーウェーブ製協働ロボット COBOTTA PRO へのSMR0120取付事例です。
FA・産業用ロボット製品
形式:SMR
リニア搬送の推進力で段取装置を動作・高速段替・タクトアップ
メカ式動作のスマートシリーズロケートクランプ(model KSL)を活用し、
リニアコンベアモジュールの推進力によってスライダ上のパレットを取付け、取外しが可能です。
動作時間によるロスタイムはゼロ、タクトタイムを短縮できます。
撮影協力:ヤマハ発動機株式会社殿
FA・産業用ロボット製品
形式:KSL
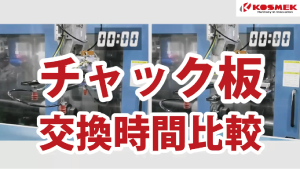
チャック板交換時間比較事例!わずか6秒!更に工具レス!
実際の取出ロボットにて、チャック板の交換時間を測定しました。
一般的なボルト止めと比較し、クイックチャックチェンジャーなら、
わずか3秒で取外し、3秒で取付け!
射出成形機用
形式:SXQ0030(5kg可搬タイプ)
異形ワークを旋盤加工!旋盤クランプのエア源切り離し実例
エアノンリークバルブとハイパワーエアクランプを使用し、
旋盤加工をしているユーザ様の実例です。
※ご使用になる旋盤条件への適合性を必ず分析・評価してからご採用ください。
工作機械ジグ関連機器
形式:BWA/BWB
ダイカスト押出ロッド接続:ダブルナット方式の問題解決
ダブルナット方式からエジェクタカプラ方式への置き換え事例
押出ロッドの交換時間の半減を実現し、
マシン稼働率向上と、働き方改革を推進!
ダイカストマシン用
形式:PMG
ソフトロボットハンドのワンタッチ交換で更なる汎用性を実現
「ブリヂストン ソフトロボットハンド」は、対象物の形状・硬さにならって掴むことができる「これまでにない汎用性」を持ったハンドです。
「コスメック マニュアルチェンジャー」と併用することで「更なる汎用性」を実現します。
撮影協力:株式会社ブリヂストン ソフトロボティクス ベンチャーズ殿
FA・産業用ロボット製品
形式:SXR
プレス金型サイズの統一不要なクランプ導入事例をご紹介!
ロングストローク&レバースペーサタイプにより、
金型の取付板厚さと幅にバラツキがあっても、
オートクランプの採用が可能です。
撮影協力:高千穂システムエンジニアリング株式会社殿
プレス機械用
形式:GBC-F
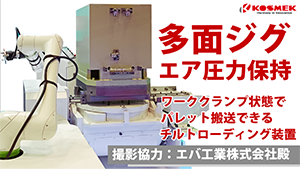
多面ジグ エア圧力保持でクランプ状態を維持し搬送
エア源とジグを切り離しても圧力保持によってクランプ状態を維持。
多面ジグに対して1面ずつワークをセット、クランプすることができ、不要な配線がなくなります。
撮影協力:エバ工業株式会社殿
工作機械ジグ関連機器
形式:BWA/BWB、WCE
動力源不要 スマートシリーズ 高速パレット交換ワーク固定
どんな設備にもフィットする動力源を選ばないスマートシリーズ。
パレットを簡単に交換・段取り替えできる位置決めクランプと下降しながらスイング動作しレバーによりワーククランプする製品を紹介します。
FA・産業用ロボット製品
形式:KSS/KSL
リニアコンベア活用 エア源との切り離しワーク搬送と高負荷作業
エア源との切り離しでエア配管の引き回しを不要に。リニアコンベア直接負荷が加わらないようにした事例を紹介します。
撮影協力:ヤマハ発動機株式会社殿
FA・産業用ロボット製品
形式:JWC/JWD/SWJ/WNC/BWD
ジグパレットのエア源切断後もエア圧保持!
エアノンリークバルブ導入事例
パレット内のエア圧を保持したまま、加工ステーションへ搬送!
エア源レスで、アクチュエータのロック状態を維持!
工作機械ジグ関連機器
形式:BWQ
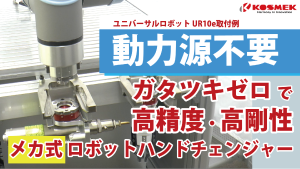
メカ式ロボットハンドチェンジャー Model SMR取付事例
ユニバーサルロボット社製協働ロボット UR10e へのSMR0120取付事例です。
FA・産業用ロボット製品
形式:SMR
協働ロボットによる加工機内のパレット交換事例
上面の干渉を気にせずスムーズな搬入出が可能!
自動で加工機内のパレット固定と高精度位置決めが可能!
撮影協力:協立機械株式会社殿
FA・産業用ロボット製品
形式:WVA/WVS
作業テーブル簡単交換、ロボットによる組立を汎用化!
スクリューロケーター導入事例
半導体検査装置の組立工程において、
多品種対応のための作業テーブルの段替えが容易に!
撮影協力:フジセン技工株式会社殿
FA・産業用ロボット製品
形式:VXF
組立工程自動化、人とロボットを置き換え!
ロボットハンドチェンジャー導入事例
川崎重工業製duAroを使用し、今までは人が実施して
いた半導体検査装置の組立工程のネジ締めを自動化!
撮影協力:フジセン技工株式会社殿
FA・産業用ロボット製品
形式:SWR
更に信頼性向上!ワークサポートに新機構搭載! Model WNC
⻑時間停⽌後、乾燥したスラッジ等の固着によりプランジャバネ⼒で動作できない場合、ノックアウト機構により固着を解除させ、動作の信頼性が向上しました。
工作機械ジグ関連機器
形式:WNC
メカ式ロボットハンドチェンジャー Model SMR
動力源不要!ガタツキゼロで高精度・高剛性
メカ式ロボットハンドチェンジャー
FA・産業用ロボット製品
形式:SMR
300kg可搬ロボットハンドチェンジャー導入事例
300kg可搬のロボットハンドチェンジャーを用いて2種類のハンドを交換します。
撮影協力:株式会社HCI殿
FA・産業用ロボット製品
形式:SWL
可搬質量15kg!チャック板を工具レス交換
成形品取出ロボット用
クイックチャックチェンジャーに、
待望の15kg可搬タイプを追加ラインナップ!
射出成形機用
形式:SXQ
ロボット台車連結!! 加工設備へのワーク自動投入事例
ロボットと機械設備を連結します。台車全体を設備に連結するのではなく、台車上のロボットを搭載した揺動できるパレットを設備に連結する事で地面高さのバラツキに対応します。
FA・産業用ロボット製品
形式:WVG
協働ロボットセルとワークストッカの高精度接続事例
ロボットセルのワークストッカを簡単入れ替え!
高精度接続で、入れ替え後の補正不要!
撮影協力:協立機械株式会社殿
FA・産業用ロボット製品
形式:WVS
インライン3次元自動測定 スライドパレット固定事例
搬送コンベアのスライド自動搬送パレットを昇降ホールクランプ model SWJ で固定し、インライン3次元測定にてより正確なワーク測定を実現します。
FA・産業用ロボット製品
形式:SWJ
多品種ワークを専用ジグ無しで測定? 秘密公開
エアロックシリンダ model WNAを使用し、ワークを下支えします。ワークとの接触した位置でロックすることができるため様々なワーク形状や寸法のバラツキに対応でき、正確な寸法検査を実現します。
FA・産業用ロボット製品
形式:WNA
「ハイパワーリンククランプ 退避式」誕生!
「退避式」って何? 「ハイパワーエア」って何?
分かりやすく解説した動画を制作しました!
工作機械ジグ関連機器
形式:WFE
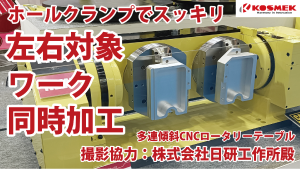
左右対称ワークのクランプ事例
ハイパワーエアホールクランプ model SWEを使用しワークをクランプしています。ホールクランプの活用でワーク外周に干渉物がなくなり5面加工が可能。ツール接近性も良くなります。
工作機械ジグ関連機器
形式:SWE,SWA,SFA,SFC
エアノンリークバルブでエア圧力を保持
エアノンリークバルブ model BWQを使用してジグのクランプ圧力を保持し、エア供給源と切り離した状態でワーク(加工物)のクランプ状態を維持します。
工作機械ジグ関連機器
形式:BWQ
協働ロボットDOBOT CRのハンドをワンタッチ交換事例
マニュアルロボットハンドチェンジャーが
DOBOT CR Seriesに採用された事例をご紹介
FA・産業用ロボット製品
形式:SXR
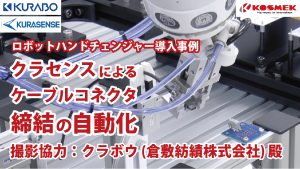
チェンジャー導入事例:ケーブルコネクタ締結の自動化
クラセンスによるケーブルコネクタ締結システムに
ロボットハンドチェンジャーが採用されています。
撮影協力:クラボウ(倉敷紡績株式会社)殿
FA・産業用ロボット製品
形式:SWR
金型交換 電動走行 無軌道台車
射出成形機の金型交換を早く、楽に、安全に!
電動走行方式の無軌道台車で、誰でも作業が可能です。
(※ 本動画の台車は、特殊対応品となり、製品版とは異なります。)
射出成形機用
ロボットによるパレット自動搬送システム
溶接ジグや加工機へのパレット自動段取り替えを実現
撮影協力:株式会社カトウ殿
FA・産業用ロボット製品
形式:WVA/WVS
溶接周辺機器導入事例 溶接工程自動化ライン
溶接工程自動化ラインへのコスメック溶接周辺機器の導入事例
FA・産業用ロボット製品
形式:SWP/WHG
ワーククランプシステム導入事例 FSW 摩擦攪拌接合
FSW 摩擦攪拌接合にコスメックのワーククランプシステムが採用されています。
加工機:ホーコス製マシニングセンタ NS70 FSW
撮影協力:ホーコス株式会社殿
工作機械ジグ関連機器
形式:LHW/SFA
ロボットハンドチェンジャー導入事例 全自動平面研削システムSELF
岡本工作機械製作所製 全自動平面研削システムSELFに
協働ロボットと、ロボットハンドチェンジャーが採用
撮影協力:株式会社岡本工作機械製作所殿
FA・産業用ロボット製品
形式:SWR
壁面取付できる!強靭な旋回機構のエアスイングクランプ model WHC
エアスイングクランプ:model WHCは、壁掛姿勢(垂直面への取付)で使用できます。※レバーが重いと動かなくなったり、故障の原因となります。壁掛姿勢で使えるレバーの重量・重心位置の計算方法はカタログの注意事項にて記載しておりますので、ご確認いただき、ご選定ください。
工作機械ジグ関連機器 / FA・産業用ロボット製品
形式:WHC
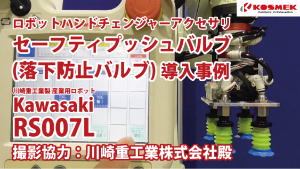
セーフティプッシュバルブ(落下防止バルブ)導入事例
ロボットハンドチェンジャーアクセサリ
セーフティプッシュバルブを使用すると、
万一の誤操作でも、ツール落下を防止します!
撮影協力:川崎重工業株式会社殿
使用ロボット:Kawasaki RS007L
FA・産業用ロボット製品
形式:SWRA
ロボットハンドチェンジャー導入事例 Kawasaki RS007L
川崎重工業製ロボット(RS007L)への
ロボットハンドチェンジャー(SWR0070)導入事例です。
撮影協力:川崎重工業株式会社殿
FA・産業用ロボット製品
形式:SWR
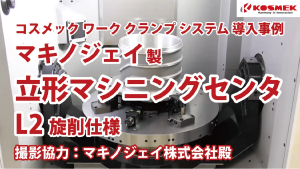
ワーククランプシステム導入事例 立形マシニングセンタ旋削仕様
マキノジェイ製 立形マシニングセンタ L2 旋削仕様にコスメックのワーククランプシステムが採用されています。
撮影協力:マキノジェイ株式会社殿
工作機械ジグ関連機器
形式:LKC/LC/BLG
ロボットハンドチェンジャー導入事例 ばら積みピッキング工程
平田機工製ロボットAR-Vに、ロボットハンドチェンジャーが採用
垂直多関節ロボット2台で「ワークのばら積みピッキング」と「バリ取り」
を行う先進的システム
FA・産業用ロボット製品
形式:SWR
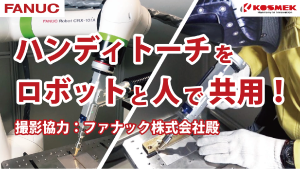
ハンディトーチをロボットと人で共用! (2022国際ウェルディングショー出展品)
手動チェンジャーなら、トーチを簡単着脱!工具レス・時短!
手動溶接とロボット溶接の使い分けが可能!
撮影協力:ファナック株式会社殿
使用ロボット:FANUC Robot CRX-10iA
FA・産業用ロボット製品
形式:SXR
溶接工程自動化 (2022国際ウェルディングショー出展品)
コスメックの溶接周辺機器を紹介いたします。
使用ロボット:YASKAWA MOTOMAN-GP8
FA・産業用ロボット製品
形式:SWR,SWP,WVG,JVC/JVD
くし刃型旋盤のカンコツ排除!
ツールユニットを高精度段取り替え!
スクリューロケーターを導入すると「カンコツ」に頼らず、
新入社員でも一発で位置が決まります!
撮影協力:株式会社エグロ殿
工作機械ジグ関連機器
形式:VXF
QDCS 金型オートクランプ(Model GA)導入事例
QDCS(クイック ダイ チェンジ システム)
ボタン一つで金型を固定し、安全に金型交換時間を短縮
撮影協力:株式会社伊藤製作所殿
プレス機械用
形式:GA
【お困りごと解決事例】中子シリンダの引抜不良発生!ブースターなしで改善するには?
【お困りごと】品質向上のため、型開き完了後に中子シリンダの引抜動作を行うよう変更したところ、 離型抵抗が増し、引抜不良が発生した…。改善のために、ブースターを入れると、中子シリンダの最高使用圧力を超えてしまう…。
ダイカストマシン用
形式:PCA
多彩なロボットハンド事例 (2022国際ロボット展出展品)
コスメックでは、多彩なロボットハンドをラインナップしております。
他にはない特色あるハンドを実際にロボットに取り付けた状態でご紹介いたします。
使用ロボット:YASKAWA MOTOMAN-GP8
FA・産業用ロボット製品
形式:SWR/WPT/WHC/WKH/SWP
真円度測定機でのエアチャック切り離し事例
コスメックのエアノンリークカプラは、加圧状態でエア回路を切り離すこと
でエア圧を保持することができます。
撮影協力:仲精機株式会社殿
工作機械ジグ関連機器
形式:BWA/BWB
協働双腕ロボット duAro2のハンドを手動でワンタッチ交換
マニュアルロボットハンドチェンジャー(Model SXR0030)は、
川崎重工業製協働ロボットduAro1/duAro2に直接取付可能です。
使用ロボット:Kawasaki duAro2
FA・産業用ロボット製品
形式:SXR
金型の取付板厚さ20mmのバラツキに対応できるクランプ
金型の取付板厚さ20mmのバラツキに対応できるレバースペーサタイプの
特長が良く分かるデモ機動画です。
射出成形機用 / プレス機械用
形式:GBC-F
金型オートクランプ 新オプション:レバースペーサタイプ Model GBC-F
ロングストロークタイプの金型オートクランプにレバースペーサを
取り付けることで、金型の取付板厚さ20mmのバラツキに対応できます。
射出成形機用 / プレス機械用
形式:GBC-F
協働ロボット UR10eのハンドを手動でワンタッチ交換
マニュアルロボットハンドチェンジャー(Model SXR0070)は、
ユニバーサルロボット社製協働ロボット
UR3/UR3e/UR5/UR5e/UR10/UR10eに直接取付可能です。
使用ロボット:Universal Robots UR10e
FA・産業用ロボット製品
形式:SXR
ロケートハンド使用事例のご紹介
1つのハンドで複数ワークに対応
FA・産業用ロボット製品
形式:WKH
【コスメック工場の自動化事例紹介】多品種少量生産でのロボットによる自動化事例
ロボットによる「自動ジグ段取り替え方式」によって、ロボットと加工機を汎用化し、サイズ違いのワークを加工できるよう段取り替えを自動化した事例をご紹介
工作機械ジグ関連機器 / FA・産業用ロボット製品
形式:SWR / WPT / WPP / VS
世界最小クラスのエアスイングクランプ
ゴシックアーチ形状の3本のリード溝による強靭なスイング機構。
ハイスピード・高精度・高寿命なエアスイングクランプ(ロータリークランプシリンダ)です。
工作機械ジグ関連機器 / FA・産業用ロボット製品
形式:WHC
成形品取出ロボット用クイックチャックチェンジャー
チャック板・ゲートカット用ニッパーをワンタッチ交換!
射出成形機用
形式:SXQ
大径穴を高精度位置決めするロケートシリンダ
ピンが拡縮径し、ワーク穴を内張りして位置決め
工作機械ジグ関連機器
形式:VFP
人協働ロボット YASKAWA HC10のハンドを手動でワンタッチ交換
マニュアルロボットハンドチェンジャーが
安川電機製人協働ロボットMOTOMAN-HC10DTPに採用されています。
使用ロボット:YASKAWA MOTOMAN-HC10DTP
FA・産業用ロボット製品
形式:SXR
横押しに特化したサイドクランプ
従来のリンククランプでは対応できない横押しに最適な
サイドクランプ誕生
工作機械ジグ関連機器
形式:LSA / LSE
動作確認機能付単動クランプ
エア1ポートでロック/リリース動作を検知
動作確認機能付7MPa 単動スイング/リンククランプ誕生
工作機械ジグ関連機器
形式:LGV / LJV
【特別企画】夢の横段取り 人の介在しないフレキシブル生産
金型交換台車の完全自動化をご提案
使用ロボット:OMRON TM12
射出成形機用
【お困りごと解決事例】鋳抜きピンのテーパ角変更により、大きくなった離型抵抗の対策
【お困りごと】鋳抜きピンのテーパ角変更により、離型抵抗が増え、
引抜力不足が発生した…。ブースターを使わずに引抜力を上げる方法とは?
ダイカストマシン用
形式:PCA
【お困りごと解決事例】大径鋳抜きピンの離型抵抗による押出しピン折損をなくす
【お困りごと】大径鋳抜きピンの離型抵抗により押出しピンの折損が頻繁に起き、
困っている。油圧シリンダを使用し、離型前に鋳抜きピンを引抜く構造に変更したいが、
様々な問題が出てきた…。
ダイカストマシン用
形式:PCE
台車でロボットを移動して使う段取替え事例
台車上のジグを高精度位置決めして連結するロボット段取り替え例です。
ツール交換も手動チェンジャーで簡単です。
撮影協力:株式会社デンソーウェーブ殿
使用ロボット:COBOTTA (コボッタ)
FA・産業用ロボット製品
形式:SWT / RQC / SXR / WNC /VRA /WPH
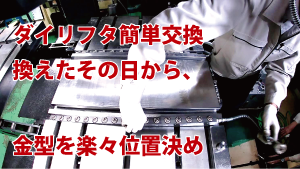
【お困りごと解決事例】ダイリフタを交換した日から、金型を楽々位置決め
【お困りごと】ローラタイプのダイリフタは、横方向に金型を動かしがたく
位置決めに苦労している。
プレス機械用
形式:RQA
ユーシン精機製取出ロボットのチャック板をワンタッチ交換
マニュアルロボットハンドチェンジャーにより、
チャック板を簡単に交換
ユーシン精機製取出ロボットへの採用事例
本動画内の取出ロボット:FRA / YcⅡ-150
射出成形機/ FA・産業用ロボット製品
形式:SXR
ロボットマシニングセンター INFINITY KATANAへのチェンジャー導入事例
ロボットマシニングセンター INFINITY KATANA に
ロボットハンドチェンジャーが採用されています。
撮影協力:インフィニティソリューションズ株式会社殿
使用ロボット:KUKA AGILUS KR10 R1100-2
FA・産業用ロボット製品
形式:SWR
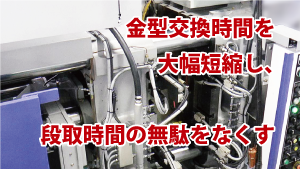
【お困りごと解決事例】金型交換時間を大幅短縮し、段取時間の無駄をなくす
【お困りごと】小ロットのダイカスト製品が増え、ダイカストマシンの金型交換が
高頻度になり、1日のうち金型の段取りに多くの時間を費やしている…。
ダイカストマシン用
形式:GKE
ボールタイプ? ローラタイプ? どっちを選ぶべき?
油圧式フリーローラリフタ(ボールタイプ) Model RQA
油圧浮上式ダイリフタ(ローラタイプ) Model RA
それぞれの特長を説明します。
プレス機械用
形式:RQA,RA
【お困りごと解決事例】アンギュラピンなしのアンダーカット処理で、メンテナンスの無駄をなくす
【お困りごと】アンギュラピンの破損、交換頻度が高く困っている。
スペースがなく大サイズの中子シリンダが配置できない…。
ダイカストマシン用
形式:PCA
【お困りごと解決事例】オートクランプの動作不良をなくし、チョコ停なし
【お困りごと】オートクランプのリリース不良に困っている。
厳しいダイカスト環境下では、仕方がないことなのか…。
ダイカストマシン用
形式:GKB
原料調合装置の耐高荷重自動化ハンドに
医療用漢方製剤メーカーのツムラ様のご採用事例です。
原料調合装置の耐高荷重自動化ハンドに特殊対応のハイパワー
エアクランプとハイパワーエアワークサポートを活用。
FA・産業用ロボット製品
形式:WCE,WHE,WNC
協働ロボット FANUC CRXのハンドを手動でワンタッチ交換
マニュアルロボットハンドチェンジャーが
ファナック製協働ロボットCRX-10iAに採用されています。
撮影協力:ダイドー株式会社殿
使用ロボット:FANUC Robot CRX-10iA
FA・産業用ロボット製品
形式:SXR0070
省スペースで大きな金型の搬出入を実現
ロングプリローラでも、
生産中にプレス前面のスペースを確保
着脱式プリローラスタンドのご紹介
プレス機械用
形式:MR□
スター精機製取出ロボットのチャック板をワンタッチ交換
マニュアルロボットハンドチェンジャーにより、
チャック板を簡単に交換
スター精機製取出ロボットへの採用事例
射出成形機/ FA・産業用ロボット製品
形式:SXR
モールドロケータ導入事例
ロケートリング不要で金型を位置決め
金型交換が簡単かつ時間短縮
撮影協力:福山合成株式会社殿
射出成形機用
形式:MHB
JIMTOF2020 Online 新製品動画
JIMTOF2020 Onlineのコスメック新製品紹介動画です。
工作機械ジグ関連機器
形式:LFW,LFA,FWD,WNC-M,WHE,WCE,LHA-Y0,LG-Q
垂直折りたたみ式プリローラ導入事例
プリローラにより、
スライドに干渉せず
クレーンで金型を搬入できます。
プレス機械用
形式:MR□
MELFA ASSISTAのハンドを手動でワンタッチ交換
マニュアルロボットハンドチェンジャーが
協働ロボットMELFA ASSISTAに採用されています。
撮影協力:三菱電機株式会社殿
使用ロボット:MELFA ASSISTA(RV-5AS-D)
FA・産業用ロボット製品
形式:SXR
エアフリーローラリフタ(ダイリフタ)導入事例
エアフリーローラリフタにより、ボルスタ上で、
金型を360°フレキシブルに動かせます。
プレス機械用
形式:RQC
搬送台車とロボットに「高精度位置決めを足すと」
搬送台車やAGVとロボットを「メカ」でつなぐソリューション 撮影協力:因幡電機産業株式会社殿
FA・産業用ロボット製品
形式:SWT,RQC,WNC,JWC/JWD,SWR,VRA
マグネットクランプ KOSMEK ORIGINAL 設計製造一貫
MADE IN JAPAN 国内生産
射出成形機用
形式:MAK
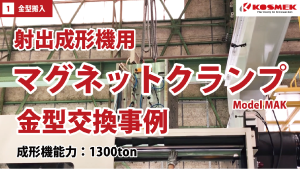
マグネットクランプ 金型交換事例(成形機能力:1300ton)
ボタンひとつで、マグネットクランプが金型をロック
操作ペンダントに着磁力を表示し、見えない磁力を『数値化』
射出成形機用
形式:MAK
マグネットクランプ IPX5相当防水試験
防水試験により、IPX5相当の防水性を確認
射出成形機用
形式:MAK
ピンクランプ フローティングタイプのご紹介
フローティングタイプを新ラインナップ
FA・産業用ロボット製品
形式:SWP
テックマンのハンドをワンタッチ交換
マニュアルロボットハンドチェンジャーにより、
テックマンのハンドをワンタッチ交換
撮影協力:プレミアエンジニアリング株式会社殿
FA・産業用ロボット製品
形式:SXR
パレットグリッパ導入事例
ロボットによるジグ交換を簡単に
狭い機械内への搬送アプローチが容易
FA・産業用ロボット製品
形式:WVA
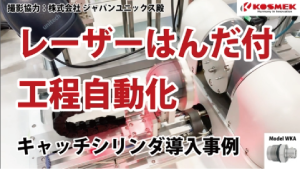
はんだ付工程自動化
キャッチシリンダで、3Dはんだ付けのジグプレートを
軽量・コンパクト化し、スマートオートメーションに貢献
FA・産業用ロボット製品
形式:WKA
KOPISコスメックピアシングシステム導入事例
プリント基板ノックアウトユニット
安定した基板打ち抜きを実現
プレス機械用
形式:KOPIS
COBOTTAのハンドをチェンジ
使用ロボット:デンソーウェーブ製COBOTTA
撮影協力:アサ電子工業株式会社殿
FA・産業用ロボット製品
形式:SWR0010,WPT,WPA
超軽量ハンドチェンジャーでYuMiのハンドをチェンジ
双腕なら1台で、搬送・組付・段替えを同時実現
使用ロボット:ABB製YuMi
FA・産業用ロボット製品
形式:SWR0010,VWH,WNC,WHA,WPT
油圧式フリーローラリフタを新発売!
軽い力で金型の位置決めが容易に!
既存のローラタイプからボールタイプへ置き換え可能!
油圧タイプで、エアタイプよりも耐荷重が高い!
プレス機械用
形式:QDCS
力覚センサとナットランナの自動交換
1台のロボットで嵌め合いとねじ締めを両立
撮影協力:株式会社ダイヘン殿
使用ロボット:FD-V25
FA・産業用ロボット製品
形式:SWR
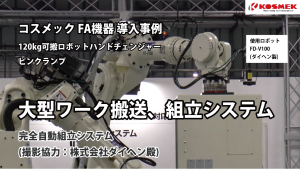
完全自動組立システム
120kg可搬ロボットハンドチェンジャーによる大型ワークの搬送
ピンクランプによる大型ワークの位置決め、クランプ
撮影協力:株式会社ダイヘン殿
使用ロボット:FD-V100
FA・産業用ロボット製品
形式:SWR,SWP
ロボットによる検査工程自動化
タップ穴自動検査装置と栓ゲージのツールチェンジ
ガタのないチェンジャーで、確実な検査
撮影協力:株式会社第一測範製作所殿
FA・産業用ロボット製品
形式:SWR
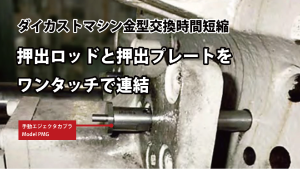
手動エジェクタロッドによるダイカスト金型交換時間短縮
ダイカストマシンの押出ロッドと押出プレートをワンタッチで連結
ダイカストマシン用
形式:PMG
ロボットの高精度段取り替えで再ティーチングレス
位置再現精度3μmで、ロボット段取り替えによる
再ティーチング、カメラ補正が不要。
FA・産業用ロボット製品
形式:SWQ
多軸ロボット用自在ハンド×ロボットハンドチェンジャー
トークシステム:多軸ロボット用自在ハンドと、
コスメック:ロボットハンドチェンジャーのコラボレーション
FA・産業用ロボット製品
形式:SWR
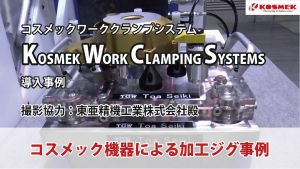
KWCSコスメックワーククランピングシステム導入事例
ワーククランピングシステムの導入事例デモ
(撮影協力:東亜精機工業殿)
工作機械ジグ関連機器
形式:KWCS
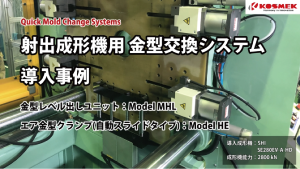
射出成形機用金型レベル出しユニット・エアクランプ導入事例
射出成形機用金型交換システム
金型レベル出しユニット:Model MHL
エア金型クランプ(自動スライドタイプ):Model HE
射出成形機用
形式:QMCS
金型交換システム導入事例 ロボット搬送プレスライン
金型交換システムがロボット搬送プレスラインに
採用されています。
プレス機械用
形式:QDCS
金型交換システムがガントリーローダー搬送プレスラインに採用
金型交換システムがガントリーローダー搬送プレスラインに
採用されています。
プレス機械用
形式:QDCS
MF-Tokyo2019 ヴァーチャル展示会
弊社は、2019年7月31日から4日間、東京ビッグサイトにて開催された
「第6回プレス・板金・フォーミング展 MF-Tokyo2019」に出展いたしました。
多数のご来場、誠にありがとうございました。
プレス機械用
形式:QDCS
プレスマシン周辺機器
コスメックプレスマシン周辺機器のご紹介
プレス・搬送・溶接工程を段取改善
プレス機械用
形式:QDCS
FA・産業ロボット向け機器導入事例集 vol.3
FA・産業ロボット向け機器導入事例集です。
FA・産業ロボット向け機器
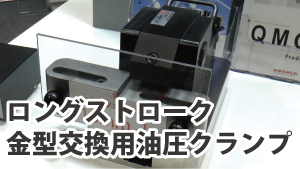
ロングストローク対応の金型用油圧クランプ
射出成形機・プレスマシンの金型交換時間を短縮する金型固定用自動クランプです。ロングストロークモデルのGBCクランプは金型取付板の厚みにバラツキに対応できます。
射出成形機用 / プレス機械用
形式:GBC
【実加工比較】ハイパワーエアスイングクランプ vs 標準エアクランプ
ワーククランプにハイパワーエアスイングクランプ(model WHE)と 標準エアスイングクランプ(model WHA)を使用して加工の違いを検証しています。
工作機械ジグ関連機器
形式:WHE
双腕スカラロボットによる基板の搬送、検査工程
ロボットハンドチェンジャーが双腕スカラロボットduAro2(川崎重工製)
による基板の搬送、検査工程に採用
ガタのない位置再現精度3μmで、ロングアームでも先端のブレは極小
FA・産業用ロボット製品
形式:SWR
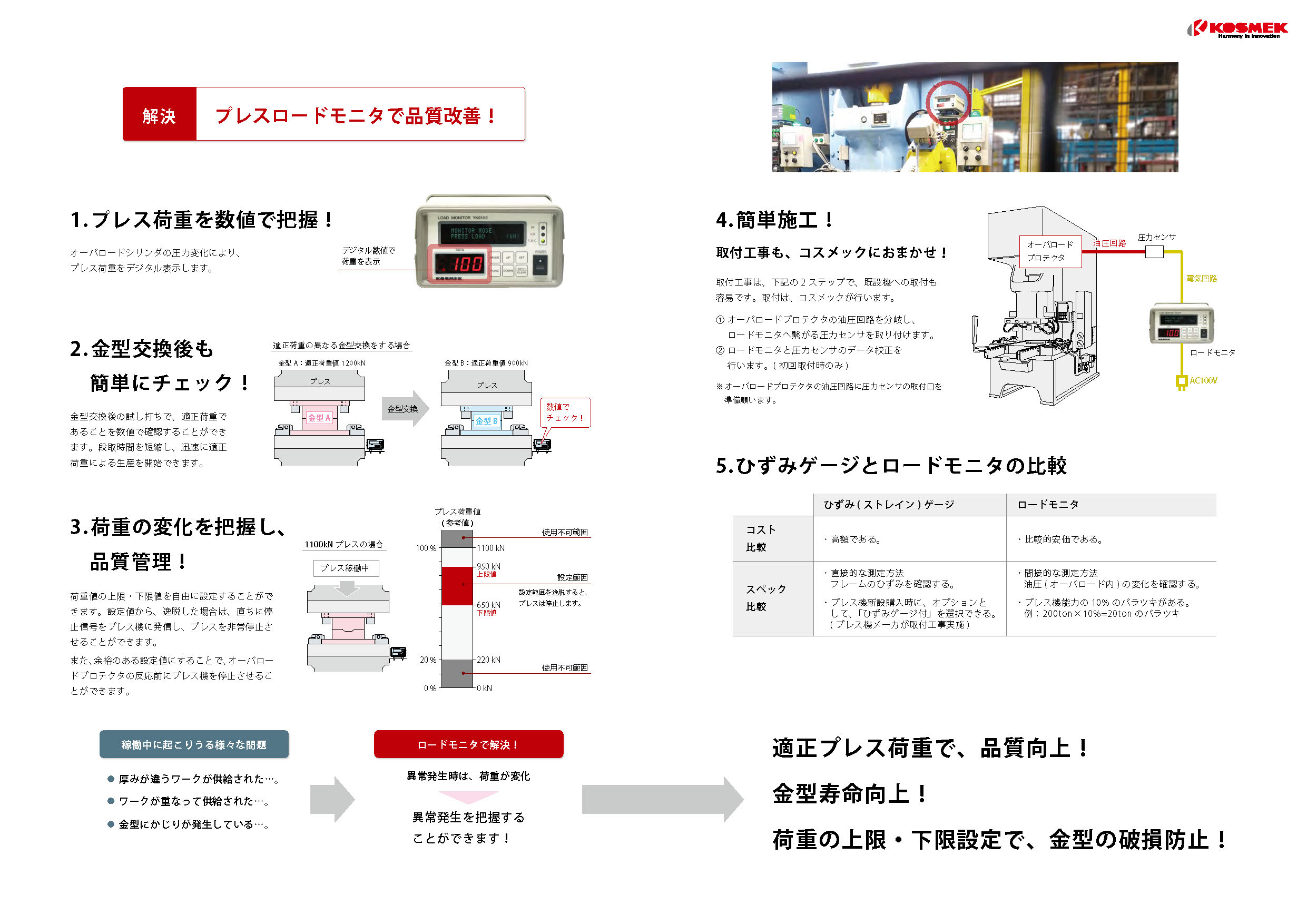
プレス品質改善 ロードモニタで精度管理
プレス製品の品質管理に困っていませんか?
KOSMEKのロードモニタで解決!
プレス荷重を数値で把握!
製品の精度管理が可能!
プレス機械用
形式:QDCS
ワークサポートによるビビリ止め効果の確認
#30立型マシニングセンタでのアルミワークの加工において
ワークサポートの有無によるビビり量の差を確認
工作機械ジグ関連機器
形式:WNC
プレス間搬送ガントリーローダーのアームチェンジ事例
プレス間搬送アームを高精度に交換
ロングアームでも安定した搬送を実現
プレス機械/ FA・産業用ロボット製品
形式:SWR
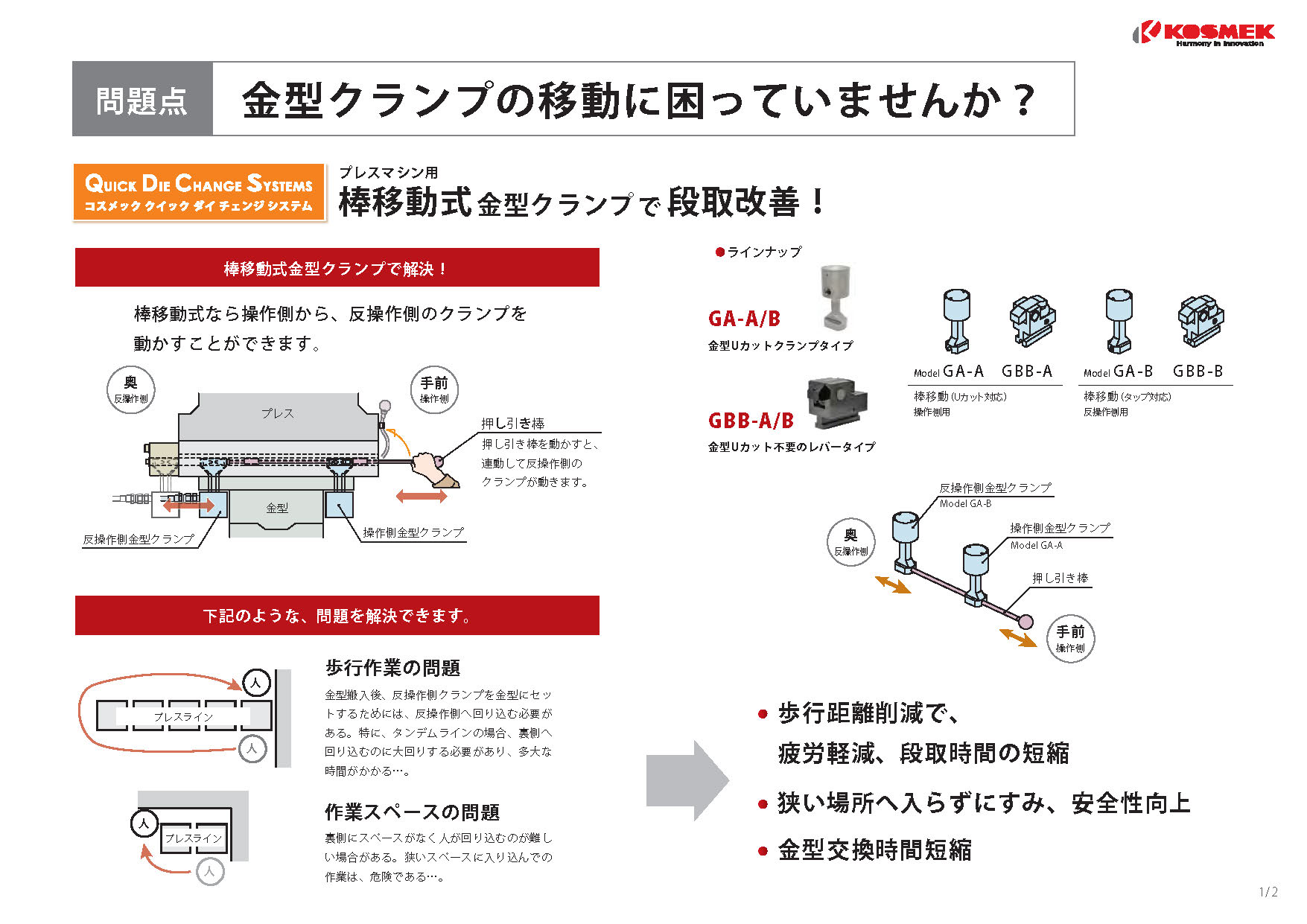
プレスマシン段取改善 棒移動式金型クランプ
金型クランプの移動に困っていませんか?
プレスマシン用棒移動式金型クランプで段取改善!
プレス機械
形式:QDCS
ハイスピードコアプルシリンダ サイクルタイム短縮事例
ハイスピードコアプルシリンダと一般的な直動シリンダを比較
サイクルタイムの短縮により、生産性11%向上
射出成形機用/ダイカストマシン用
形式:PCB/PCM
レベルユニット導入事例
金型を載せるだけでレベル出し(水平出し)が完了
繰り返し精度0.3°以内の高精度位置決め
金型搬入時の許容角度5°、金型質量2.5tonまで対応
水平器やスケールによる目視でのレベル出しが不要
取出機の補正が不要で、安定した生産を実現
射出成形機用
形式:MHL
力覚センサーによるヘリカルギア挿入
ロボットハンドチェンジャーを介した
力覚センサーによるヘリカルギア挿入
ロボット、力覚センサ:エプソン製
FA・産業用ロボット製品
形式:SWR
プレスマシン段取改善 ロングストロークシリーズ
プレスマシン用金型クランプ・ダイリフタ
ロングストロークシリーズで段取改善!
プレス機械用
形式:QDCS
リークレスカプラ エア圧を保持するカプラ
シンプルシステムのためにエア圧を保持するカプラ
エア源を切り離した状態で、エア機器のロック状態を保持
工作機械ジグ関連機器/ FA・産業用ロボット製品
形式:JWC/JWD
くるくるリンククランプ レバー向き変更による段取替え
くるくるリンククランプ Model LKK
クランプレバーの向きを360°任意位置に変更可能
レバーの向きの調整で汎用化
工作機械ジグ関連機器
形式:LKK
エアセーフティバルブ -ロボット搬送のワーク落下防止-
ロボット搬送のワーク落下防止に最適
安全のためのエアパイロットチェック弁
停電等でエア供給が停止しても、回路内の圧力を保持
FA・産業用ロボット製品
形式:BWS
エアセーフティバルブ -シリンダの姿勢保持-
シリンダの姿勢保持に最適
安全のためのエアパイロットチェック弁
停電等でエア供給が停止しても、回路内の圧力を保持
FA・産業用ロボット製品
形式:BWS
ダイカスト生産性12%向上事例
新しいコンセプトによるコアプルシリンダ
PCBハイスピードコアプルシリンダによる具体的な改善効果事例
ダイカスト生産性12%向上
ダイカストマシン用
形式:PCB
1ポート2センシングスイングクランプ
1ポートでロック・リリース動作が検知可能なスイングクランプ
動作確認が必要な自動化ラインに最適
1ポートで自動化設備のセンサ数削減
取付ジグプレートの最小厚み30mm(全サイズ共通)
工作機械ジグ関連機器
形式:LHV
バリ取り工程 コスメック機器導入事例
ロボットによるバリ取り工程の段取り改善
接続部にガタツキがなくバリ取りの高負荷に耐えるハンドチェンジャー
ハイパワープルクランプで、コンパクト、軽量な搬送ハンドを実現
ハイパワーエアパレットクランプで、パレットの自動交換
FA・産業用ロボット製品
形式:SWR,WPT,WVS,SWE,WHE,WCG
マグネットクランプ MIMS多重情報監視システムの特長
デモ機を用いて、MIMSの特長を分かりやすく解説
見えない磁力を「数値化」し、操作ペンダントに着磁力を表示
全マグネットブロックにセンサを搭載し、金型サイズ違いも正確に測定
射出成形機用
形式:MEK/MEG
マルチカプラのご紹介
金型の流体回路接続ユニット
複数のカプラを一度に接続し、金型交換時間を短縮
分離時は、軽く引っ張るだけ!
接続時は、軽く差し込むだけ!
作動油も接続できるチェック弁付きをラインナップ
チェック弁付きも軽い操作性を実現
射出成形機用/ダイカストマシン用
形式:JMC/JMD
レベルユニットのご紹介
射出成形機用金型レベル出しユニット
金型を載せるだけでレベル出し(水平出し)が完了
金型のレベル出し時間を短縮し、金型交換時間を短縮
ロケートリングとの組み合わせで、高精度な金型位置決めを実現
金型の傾き5°、金型質量2.5tonまで対応
射出成形機用
形式:MHL
マグネットクランプ MIMS多重情報監視システム導入事例
見えない磁力を「数値化」
MIMS多重情報監視システムにより、実際の着磁力をデジタル数字で表示
プレート表面温度を測定し、温度変化による着磁力の変化を算出
マグネットブロックすべてに着磁力測定用センサを搭載
(成形機能力:180ton)
射出成形機用
形式:MEK/MEG
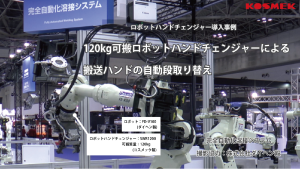
120kg可搬ロボットハンドチェンジャー導入事例 完全自動化溶接システム
120kg可搬ロボットハンドチェンジャー(Model SWR1200)が完全自動化溶接システムに採用
1台のロボットで、3種類の搬送ハンドを使い分ける
(撮影協力:株式会社ダイヘン殿)(ロボット:FD-V100)
FA・産業用ロボット製品
形式:SWR
ロボットハンドチェンジャー&電動ハンド
コスメックのエア式ロボットハンドチェンジャーを介して、電動ハンドを使用した事例
(撮影協力:株式会社HCI殿)(ロボット:CR-35iA ファナック製)
FA・産業用ロボット製品
形式:SWR
ロボットハンドチェンジャー&てるぷよハンド
コスメックのロボットハンドチェンジャーを介したてるぷよハンドの使用事例
(撮影協力:株式会社HCI殿)(協働ロボット:CR-35iA ファナック製)
FA・産業用ロボット製品
形式:SWR
ロボットハンドチェンジャー導入事例 協働ロボットによるボビン交換
ガタツキゼロのロボットハンドチェンジャーで、3つのハンドを使い分け、ボビンを交換。 (撮影協力:株式会社HCI殿) (ロボット:CR-35iA ファナック製)
FA・産業用ロボット製品
形式:SWR
0.5kg~1kg可搬ロボットハンドチェンジャー導入事例
0.5kg~1kg可搬のコンパクトなロボットハンドチェンジャーを追加ラインナップ。
0.5kg可搬ロボットや、小型パラレルリンクロボットの汎用化に最適。
チェンジャー単体の質量は合計63gと超軽量で、小型ロボットの可搬質量でも影響は極小。
(ロボット:MotoMINI 安川電機製)
FA・産業用ロボット製品
形式:SWR0010,VRA,VRC,WPA,SWJ,WKA
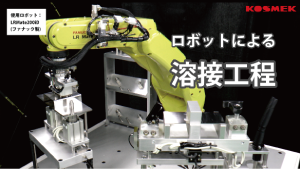
溶接周辺機器導入事例
ロボットハンドチェンジャーで3種類のツールを使い分け、溶接工程を行います。
ロケートクランプにより、ポジショナ上で、2種類のパレットを自動で段取り替えします。
3μmの高精度位置決めで、段取り替え後の溶接トーチのティーチング補正が不要です。
ハイパワープルクランプでツールをストッカに固定します。
ストッカをロボット上面に設置することにより、ロボット周辺のスペースを有効活用できます。
(ロボット:VS-068 デンソーウェーブ製)
FA・産業用ロボット製品
形式:SWR,SWP,WHG,WCG,WPT,WKH,SWQ,JY1800,SWRZ0W0
ロボットハンドチェンジャー導入事例 ラック&ピニオン式によるロボット自走
ロボットハンドチェンジャーにより、ロボットが3種のハンドを自動で交換。
自走ハンドにより、ラック&ピニオン式でロボットが自走。
ガタのないハンドチェンジャーにより、自走ハンドにかかる高負荷に耐えます。
ロボットとエアバランサを併用し、可搬質量以上のパレットを搬送可能。
(撮影協力:マルヤス機械株式会社殿) (ロボット:MOTOMAN-GPシリーズ 安川電機製)
FA・産業用ロボット製品
形式:SWR
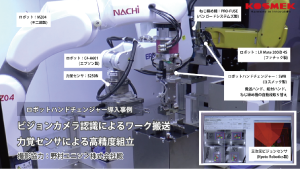
ロボットハンドチェンジャー導入事例 ビジョンカメラ認識によるワーク搬送 力覚センサによる高精度組立
3台のロボットが、ハンドチェンジしながら、組立作業を行います。
ロボットハンドチェンジャーにより、搬送ハンド・組付ハンド・ねじ締め機を自動で交換。
三次元ビジョンセンサにより、ばら積みワークを認識します。
力覚センサにより、高精度の嵌め合いでもピンをブロックの穴に挿入可能です。
ねじ締め機により、ワークのねじ締めを行います。
(撮影協力:野村ユニソン株式会社殿)
(ロボット:MZ04 不二越製、C4-A601 エプソン製、LR Mate 200iD 4S ファナック製)
FA・産業用ロボット製品
形式:SWR
中空アーム対応形ロボットハンドチェンジャー
中空アームタイプのロボットに最適化したロボットハンドチェンジャー。
中空アームに通したケーブル・エアチューブをハンドチェンジャー内部へ直接配線・配管可能。
一般的な外部への配線・配管方式と異なり、ロボットと外部にはみ出したケーブル・エアチューブとの干渉がなくなるため、ロボットの可動範囲をフルに使用できます。
(※本製品は、カタログ未掲載商品となりますので、仕様・外形寸法や、その他の中空アーム構造のロボットへの対応については、別途お問い合わせください。)
FA・産業用ロボット製品
形式:SWRY
昇降ホールクランプのご紹介
1台3役! リフトシリンダ+位置決めピン+ホールクランプを実現する昇降ホールクランプ。
リフト⇒位置決め後、パレットの基準穴を内張りして引き込んでクランプします。
コンベア搬送でのパレットの位置決めに最適です。
FA・産業用ロボット製品
形式:SWJ
ロボットハンドチェンジャー導入事例 自動テープ貼りシステム
ロボットハンドチェンジャーにより、テープ貼りユニットを自動で交換します。
ガタツキゼロのハンドチェンジャーで、テープカット時の高負荷にも耐えることができます。
1台のロボットで複数種類のテープ貼りを一貫して実現します。
(撮影協力:マルゴ工業株式会社殿) (ロボット:RS005L 川崎重工業製)
FA・産業用ロボット製品
形式:SWR
爪チェンジャー付2方チャックのご紹介
ワークを把持するレバー(爪)部の交換が可能な2方チャック。
爪の段取替えにより多品種ワークに対応できます。
FA・産業用ロボット製品
形式:WPW
まんがで発見!誰でもできる簡単改善
工場の段取り改善事例を漫画形式で、分かりやすくご紹介いたします。
工作機械ジグ関連機器
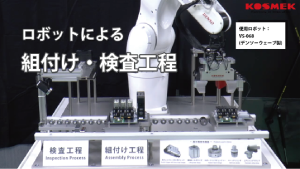
ロボットによる組付け・検査工程 (爪チェンジャー付2方チャック、昇降ホールクランプ)
コスメックの新製品、爪チェンジャー付2方チャック、昇降ホールクランプを使用したコンベア搬送ラインでのロボットによる組付け・検査工程です。
(ロボット:VS-068 デンソーウェーブ製)
FA・産業用ロボット製品
形式:SWR
薄板を「高精度位置決め」して「クランプ」するピンクランプのご紹介
位置決め部が拡径するピンクランプです。
溶接工程ではポジショナ上での薄板ワークの「高精度位置決め」と「クランプ」の自動化に、
また、搬送工程ではロボットハンドとして薄板ワークの搬送に最適です。
FA・産業用ロボット製品
形式:SWP
ダイカスト周辺機器
ダイカストの段取改善アイテムを金型側、設備側、ダイカスト前後工程別にご紹介いたします。
ダイカストマシン用
コアプルシリンダの比較
新しいコンセプトのコアプルシリンダ。同じ引抜推力で比較した場合、
ハイパワーコアプルシリンダは、一般的な直動シリンダに対して、3サイズダウンを実現。
ハイスピードコアプルシリンダは、シリンダ容量が少ないため、シリンダの動作速度が速く
サイクルタイムの短縮に貢献します。
ダイカストマシン用
形式:PCA/PCB
三菱電機製ロボットのハンドチェンジとワーク外掴み・内張りの搬送比較
多関節ロボットへのロボットハンドチェンジャー・ロケートハンド・ロボットハンドの導入事例。
(ロボット:RV-4F 三菱電機製)
FA・産業用ロボット製品
形式:SWR,WKH,WPH等
#30マシニングセンタでのハイパワーエアホールクランプ導入事例
JIMTOF2016コラボ企画:#30マシニングセンタへのハイパワーエアホールクランプ導入事例
コンパクトハンドとして、エア圧が切れてもロック状態を保持する安全なワーク搬送を実現。
ワーククランプとして、底面のみでのクランプにより、干渉物のない5面加工を可能にします。
(撮影協力:豊和工業株式会社殿)
工作機械ジグ関連機器
形式:SWE
ロボットによる溶接工程事例 スポット溶接・アーク溶接
スポット溶接工程事例:コスメックの新製品、ピンクランプを使用。
アーク溶接工程事例:溶接用・耐スパッタ対策を施した、ハイパワーエアクランプを使用。
FA・産業用ロボット製品
形式:SWR
プレスマシン用オートクランプによる金型交換システム導入事例
QDCS金型交換システムによるプレスマシンの金型交換事例。
プリローラによる安全な金型の搬入出と、油圧オートクランプによる瞬時の金型クランプを実現。
貴社の安全なプレス環境、生産性の向上に貢献します。
プレス機械用
形式:QDCS
KOSMEKが提案する電動システムの汎用化
ロボットの汎用化・工程集約により、ロボットハンドチェンジャーを採用されるお客様が増えており それと同じく、省エネ・設置スペースの問題から、電動化のニーズも増加しています。
しかし、現在のシステムではこの2つを効率よく両立させることはできません。
そこで、KOSMEKが新しい汎用化システムを提案します。
FA・産業用ロボット製品
形式:SER
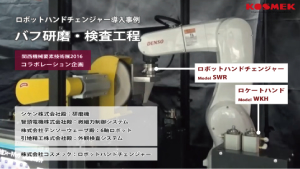
ロボットハンドチェンジャー導入事例 バフ研磨・検査工程
関西機械要素技術展2016コラボ企画:ロボットによるバフ研磨・検査工程デモ
ガタのないコスメック製ロボットハンドチェンジャーで、バリ取り・バフ研磨の高負荷に耐えます。
(撮影協力:シケン株式会社殿、智頭電機株式会社殿、株式会社デンソーウェーブ殿、引地精工株式会社殿)
FA・産業用ロボット製品
形式:SWR
ロータリーテーブル式竪型成形機用エアクランプによる金型交換システム導入事例 (成形機能力:750kN)
竪型成形機用のエアクランプによる金型交換システムの導入事例。
ボタン一つで金型のクランプが完了するので、金型交換時間を大幅に短縮できます。
ロータリーテーブル式竪型成形機の場合、上下2個の金型段取りが必要なため、特に有効です。
射出成形機用
形式:HC
ロボットハンドチェンジャー導入事例 成形品取出ロボットの吸着ツール交換
コスメックのロボットハンドチェンジャーによる成形品取出ロボットの吸着ツール交換事例。
エア圧がゼロになっても、バネによるセルフロック機能でツール落下を防止し、安全です。
射出成形機用
形式:SWR
川崎重工(デュアロ)へのロボットハンドチェンジャー導入
双腕スカラロボットへのロボットハンドチェンジャー導入事例。
ツールチェンジにより1台のロボットで様々な作業を実現できる汎用化が可能となります。
(ロボット:duAro (デュアロ) 川崎重工製)
FA・産業用ロボット製品
形式:SWR/SER
ダイカストクランプシステム導入事例(マシン能力:3500kN)
ダイカストマシンに最適化した「安全」「スピーディ」な金型交換システム。
オートクランプ自動スライドタイプの導入事例です。
ダイカストマシン用
形式:GKE/GKF
2色成形機用マグネットクランプシステム導入事例 (成形機能力:5880kN)
2色成形機に最適化したコスメック製マグネットクランプシステム。
金型交換手順をご紹介いたします。
射出成形機用
形式:MEK/MEG
ガタのないロボットハンドチェンジャーによるビットチェンジャー
機械要素技術展2016コラボ企画:真空吸着方式ネジ保持機デモ
ガタのないロボットハンドチェンジャーによるビットチェンジで、ドライバーの汎用化を実現します。
(撮影協力:有限会社サワ殿)
FA・産業用ロボット製品
形式:SWR
マグネットクランプによる金型交換と成形事例 (成形機能力:1400kN)
安全に金型交換時間を短縮し、「着磁力の見える化」と「近接スイッチによる金型密着・ハガレ検知」により、高品質な成形を実現します。
射出成形機用
形式:MEK/MEG
【新製品】スイングクランプ最速のレバー交換
スイングクランプオプション製品:クイックチェンジレバーのご紹介
工作機械ジグ関連機器
形式:LHA-A
ロボットによるバリ取り加工
ロボットハンドチェンジャーを用いたパレット段取替えによる複数ワークの加工展示
FA・産業用ロボット製品
形式:SWR,WKH,SWT,WKA等
ロボットによる外観検査工程
ロボットによる検査・洗浄デモ
ハンドの小型化を実現する製品によるワークの高精度位置決め・パレット搬送イメージ
FA・産業用ロボット製品
形式:SWR,WKH,SWT,WKA等
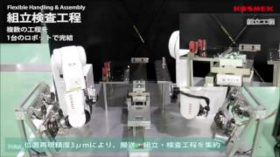
ロボットによる組立検査工程
ツールチェンジによりロボットを汎用化。様々な作業を実現
FA・産業用ロボット製品
形式:SWR,WKH,SWT,WKA等
FA・産業ロボット向け機器導入事例集 Ver.2
FA・産業ロボット向け機器
FA・産業用ロボット製品
FA・産業ロボット向け機器導入事例集
FA・産業ロボット向け機器導入事例集
FA・産業ロボット向け機器
溶接設備導入事例集
カタログ未掲載を含む溶接設備での導入事例
溶接設備
カタログ未掲載製品
エジェクタロッド交換時間を大幅短縮
クイックエジェクタロッドと一般的なエジェクタロッドの交換時間比較 (射出成形機:550ton)
段取時間を大幅短縮し、生産性を向上します。
射出成形機用
形式:PME