model SWR在异常状况导致气压断开时,具有防止机械手及工具脱落的安全自锁功能。
此功能在突发停电或气压配管断裂等而导致气压断开时,可提供安全保障。通常使用时请务必保持夹紧气压的供给。
model SWR基本上是不能直接安装在机器人上。
由于不同机器人的安装部的法兰尺寸也不同,因此需要预先准备机器人与SWR之间的连接用过渡垫块。
针对法兰尺寸遵循ISO标准的机器人,请参阅此处,本公司的选配项 (model SWRZ) 供您选择 。
请参阅这里,「机器人法兰上的过渡垫块和SWR的安装」的动画。
机器人侧model SWR-M的安装螺栓,请参照SWR-M□安装螺栓参考表。
关于工具侧,请根据客户制作的机械手及工具的螺栓孔部的厚度尺寸来确定。
※model SWR不附带安装螺栓。请根据需求自行配备。
提升功能是指,解除连结时,确保机械手及工具与机器人进行可靠分离的顶出功能。
通过提升功能,在松开(解除连结)机械手及工具时,可有效防止与工具库侧定位销的干涉而导致机器人无法脱离造成的过载或设备损伤。
连结时的提升功能,还可通过机械手快换装置(model SWR)的机器人侧(主夹紧器侧)和工具侧的间隙结构来保护着座面和定位部。再有,该连结前间隙的存在,益于通过供给气压来实现的着座确认功能的可靠性及喷气清洁功能的有效性。
下面介绍一下机器人自行自动更换机械手及工具时的流程和试教示例。
请参阅 >>> 「SWR试较参考示例」。
机械手及工具的更换频率较少,以人工进行机械手及工具的更换时,请参阅这里。
请参阅 >>>「SWR基于 气压切换阀的手动操作」。
请参阅此处的动画。
※操作员接近机器人进行作业时,机器人必须处于紧急停止的状态。
※本动画中的操作,是在机械手的重量轻,且,已确保安全的状态下进行的。机械手的重量过重或存在高温烫伤,火灾或触电等风险,且,无法确保安全时,请绝对不要使用本方法。
SWR的推荐气压回路如下图所示。
电磁阀,推荐选用3位中位封规格。
(1)选用2位电磁阀控制SWR的夹紧/松开动作(※1处)时,为了安全起见(防止工具侧脱落),请将电磁阀的非励磁状态设置为夹紧用供气口的供气状态。
(2)选用2位电磁阀控制工具侧的气压供给时,如果选用SWR的标准型号,在连结解除的状态下因气口曾开放状态而会导致气压喷出。所以推荐选用内置有单向阀的SWR-S型。另外,气压回路的设计还需考虑气压断开时防止工件脱落等安全性问题。

请参阅这里
>>>「SWR的标准型与内置单向阀型的比较」。
SWR的气口选配项符号F:带着座确认用气口(标准)规格上连接气压传感器,就可以实现机械手的连结确认。如果着座面没有完全密接而未能完成连结时,会导致气压泄漏,所以可以实现可靠的连结确认。
■ 参考回路实例

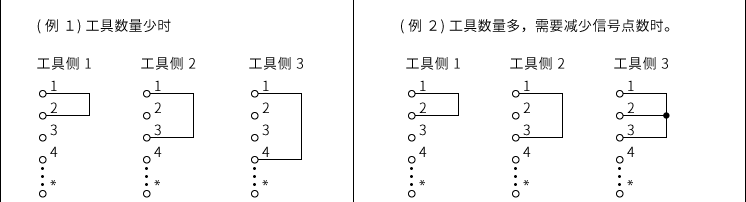
使用选配项中的电极,并,改变每个工具侧电极的短路位置,就可以通过机器人控制器或PLC实现工具的判别。
※短路用回路需要负载时,请设置必要的负载。
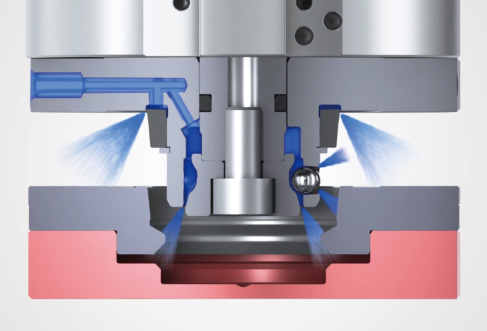
model SWR的选配项中配备了选配项A:喷气清洁功能的选配项。
通过气压供给口进行气压供给,实施喷气清洁,就可有效防止冷却液和异物的内部侵入。
model SWR用电极,其选项特别丰富,也配备了防水电极(如下记)。
可对应的型号及尺寸等详细参数,请参考样本。
- W:小型防水电极(非接触式电极)防护等级IP67 信号点数为4点(只限信号输入)
- V:防水电极(非接触式电极)防护等级IP67 信号点数为12点(只限信号输入)
- U:简易防水电极(仅限SWR的连结状态,防护等级相当于IP54)触针数16针
※ 简易防水电极仅在SWR的连结状态下,电极部的外周才会处于密封状态。
因未连结时的电极部处于裸露状态,请结合实际的使用环境进行选择。