
课题:轻量化・设计简化
为了实现机器人的一机多用或者对应多种工件,机械手的设计必须满足多功能化要求等,对机械手的设计要求非常高。
使用机械手快换装置,可以根据不同作业不同工件,选择适合的机械手,所以机械手的设计就会变得非常简单。
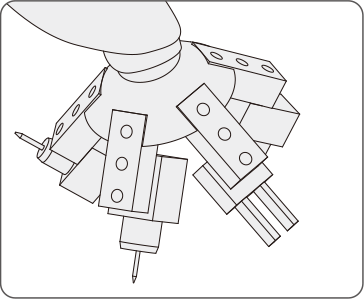
(左图)搭载了多个工具的多功能机械手,不仅重量重,为规避工具间的干涉而需调整工具的位置,容易导致机器人承受不适的力矩。
再有,配线和机械手的设计也会变得复杂。
为了实现机器人的一机多用或者对应多种工件,机械手的设计必须满足多功能化要求等,对机械手的设计要求非常高。
使用机械手快换装置,可以根据不同作业不同工件,选择适合的机械手,所以机械手的设计就会变得非常简单。
(左图)搭载了多个工具的多功能机械手,不仅重量重,为规避工具间的干涉而需调整工具的位置,容易导致机器人承受不适的力矩。
再有,配线和机械手的设计也会变得复杂。