model SWRには、異常時にエアが断たれた際のセルフロック機能というハンド・ツール落下を防止する安全機能を備えています。
本機能は、停電やホース断線などの緊急時にエアが断たれた際の安全機能となりますので、通常時は必ずロックエアを供給してください。
model SWRは、基本的にロボットに直接取り付けはできません。
ロボットによって取付フランジ部の寸法はバラバラのため、ロボットフランジとSWRの間に中間プレート(スペーサ)を用意いただく必要があります。
ISOに準拠したロボットフランジの場合、こちらの、当社オプション (model SWRZ) をご用意しています。
ロボット本体側に取り付けるmodel SWR-Mのボルトは、こちらの、SWR-M□取付ボルト参考表をご参照ください。
ツール側につきましてはお客様にて製作のハンド・ツールのボルト穴部の厚みよりご決定ください。
※model SWRにボルトは付属しておりません。お客様にて必要なボルトを手配願います。
リフトアップ機能とは、連結解除時にハンド・ツールを確実に解除するノックアウト機能です。
リフトアップ機能によって、ハンド・ツールを外す(連結解除)際、ストッカ側の位置決めピンとこじってしまいロボット離脱時に抜けないことでの過負荷や設備損傷を防止します。
連結時には、リフトアップ機能によりロボットハンドチェンジャー(model SWR)のロボット側(マスタ側)とツール側にスキマができる仕組みで着座面・位置決め部を保護します。また、連結前のスキマにより着座エアによる確実な連結確認やエアブローの効果を最大限発揮できます。
ロボットで自動的にハンド・ツール交換を行う場合の流れやティーチングの例をご紹介します。
>>> 「SWRのティーチング参考例」のページをご覧ください。
ハンド・ツールの交換頻度が比較的少なく、人がハンド交換を行いたい場合はこちらをご参照ください。
>>>「 SWRを手動エアバルブ制御する場合」のページをご覧ください。
こちらの動画をご参照ください。
※人がロボットに接近して作業する場合、必ずロボットは非常停止の状態で作業してください。
※本動画のハンドは軽量かつ安全が確保できた状態で作業を行っています。重量物や高温によるやけど、火災や感電などの危険があり安全が確保できない場合は本方法は絶対に行わないでください。
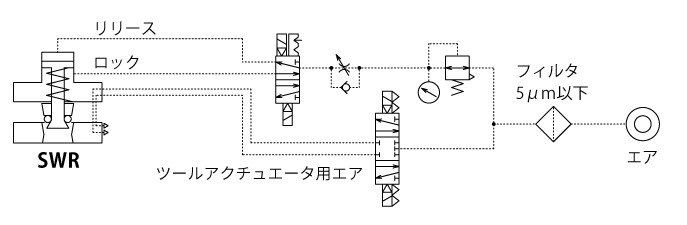
空圧回路は、下図を参考にしてください。
通常使用時は、必ずロックエアを供給し連結してください。万が一、停電等でエア圧力がゼロになってもバネによるセルフロック機能でツール落下を防止します。
【2位置の電磁弁を使用する場合】
2位置ダブルの電磁弁をご使用ください。2位置シングルの電磁弁をご使用の場合は、安全のため電源OFF時にロック側にエアが供給されるよう配管してください。リリース側にエアが供給されると、ツール(ハンド)を落下させる恐れがあり危険です。また、2位置シングルの場合、リリース状態で電源OFFになった場合、ロック動作しますのでご注意ください。
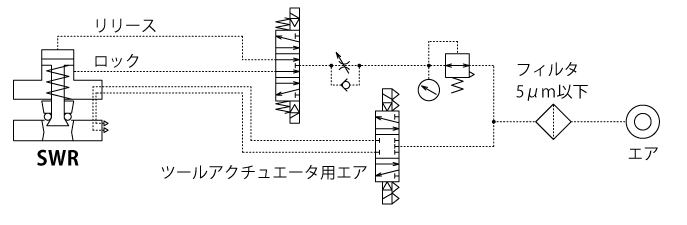
【3位置の電磁弁を使用する場合】
3位置エギゾーストセンタのバルブをご使用ください。非常停止等で電源OFF時は、ロボットハンドチェンジャーの落下防止機能によりリリース状態であってもロック動作しますのでご注意ください。
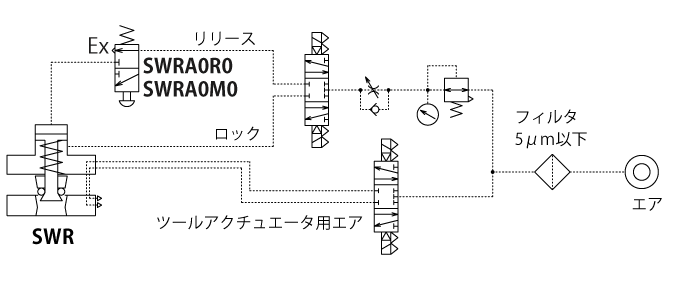
【他のバルブを選定する場合】
ロボットハンドチェンジャーの制御用電磁弁にツールアクチュエータと同じ3位置
クローズドセンタの電磁弁を使用される場合は、落下防止バルブ(SWRA)をご使用ください。
※SWRA落下防止バルブリリース側エアが所定位置のみで供給できるバルブです。
こちらの、当社製品ページ(model SWRA)を参照ください。
【ツールアクチュエータ用の電磁弁について】
ツールアクチュエータの制御バルブに2位置の電磁弁を使用する場合、ロボットハンドチェンジャーのチェック弁付き仕様のSWR-Sを選定してください。
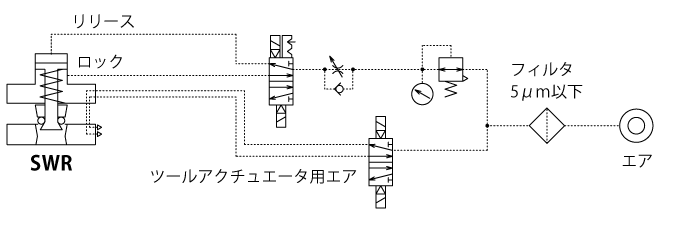
こちらの
>>>「SWR標準タイプとチェック弁付き仕様の比較」のページをご覧ください。
SWRのポートオプション記号F : 密着確認ポート付き(標準)仕様に、エアセンサを接続することで連結確認ができます。完全に着座面が密着して連結できていない場合にエア漏れが発生するため、確実な連結確認が可能です。
■参考回路例

オプションの電極を使用いただき、ツール毎に電極の短絡箇所を変えることでロボットコントローラやPLCでツール判別が可能です。
※負荷が必要な場合は、必要な負荷を取りつけてください。

model SWRにはオプション A:エアブローポート付きのオプションを用意しています。
ポートにエアを供給し、エアブローを行うことで、機器内部へのクーラントや異物の侵入を防止します。

model SWRのさまざまな電極オプションを用意しており、防水タイプ(下記)も用意しています。
取付可能なサイズ等の詳細はカタログをご参照ください。
- W:小型防水電極(非接触電極)IP67対応 信号点数4点(入力のみ)
- V:防水電極(非接触電極)IP67対応 信号点数12点(入力のみ)
- U:簡易防水電極(SWR連結時のみIP54相当) 電極数16極 ※簡易防水電極はSWR連結時のみ電極部外周をシールします。未連結時には電極部はむき出しとなるため、使用環境を考慮の上選定ください。