























SESSION.01
「働き方改革」を具現化する
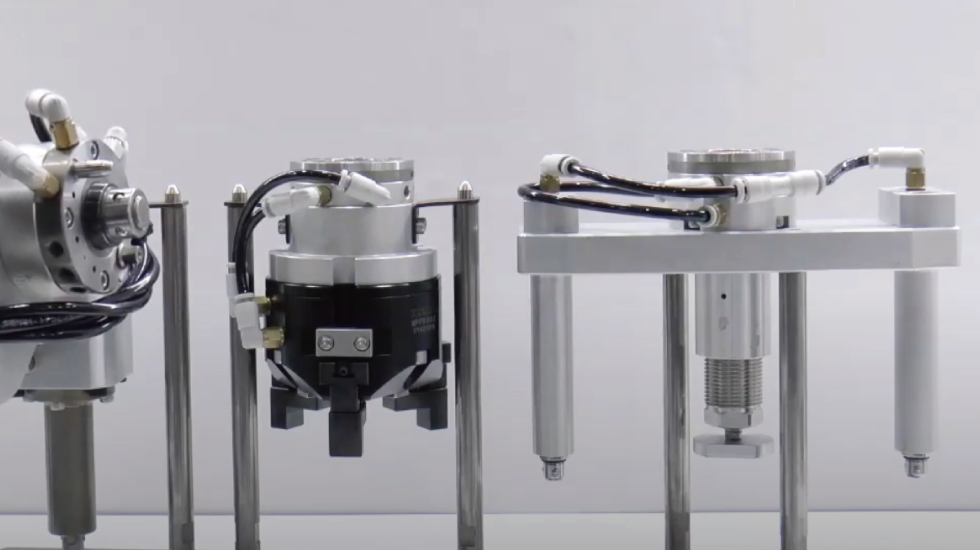
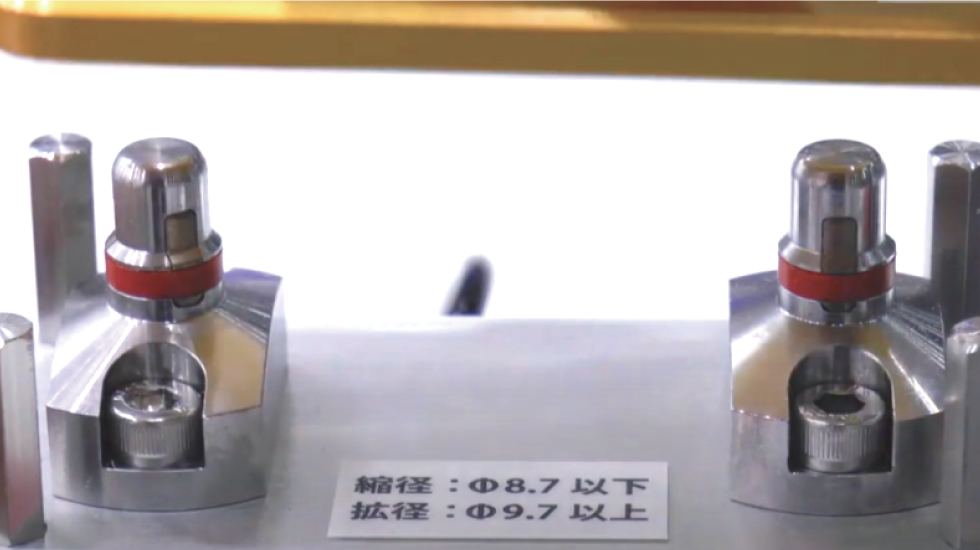
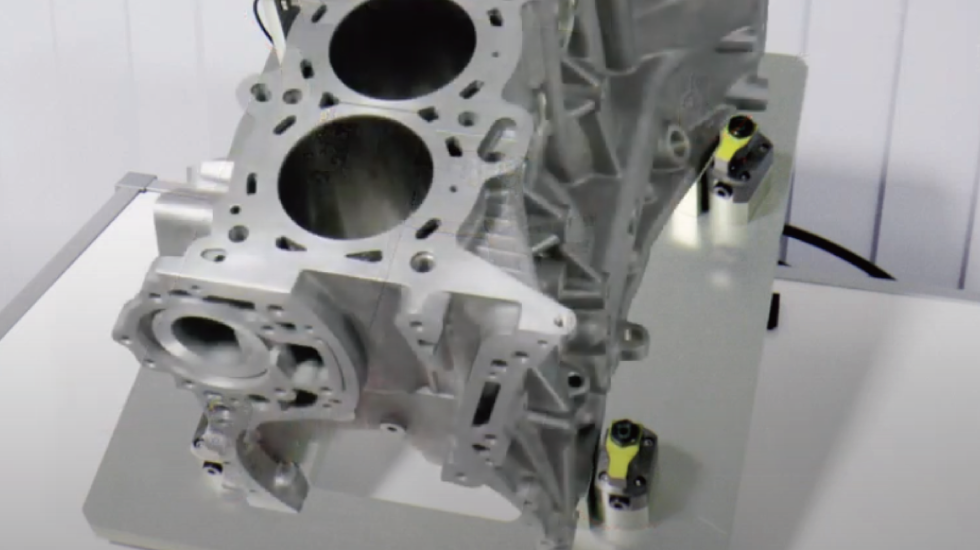
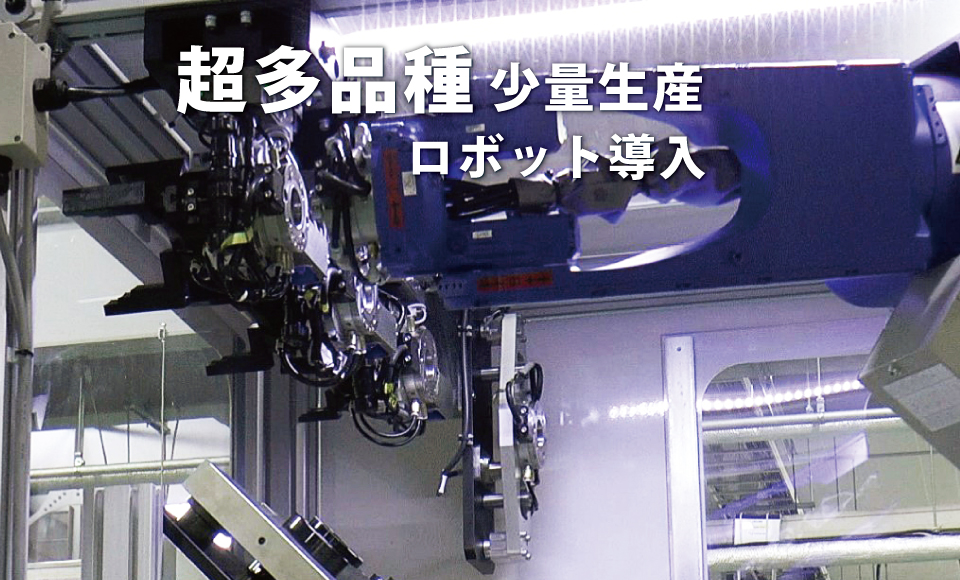
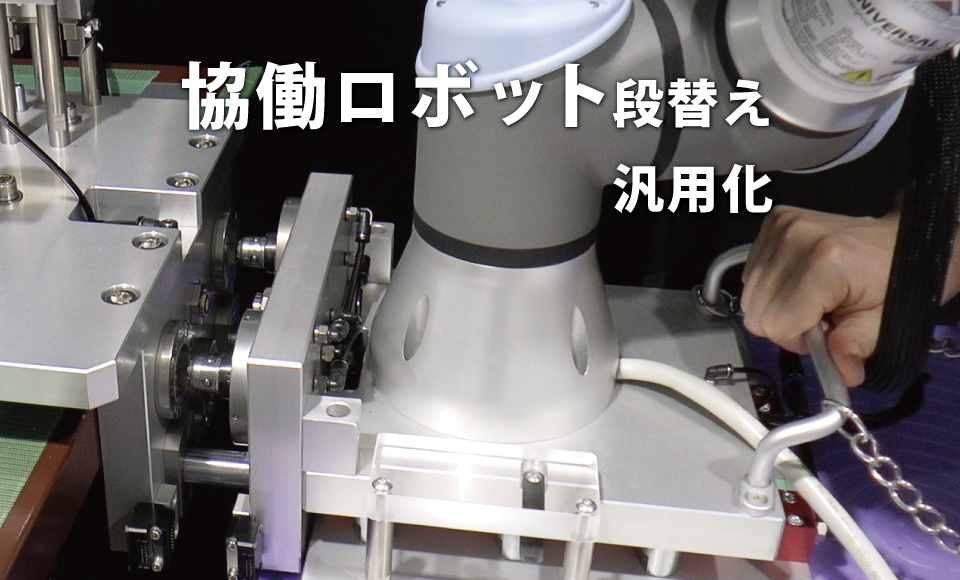
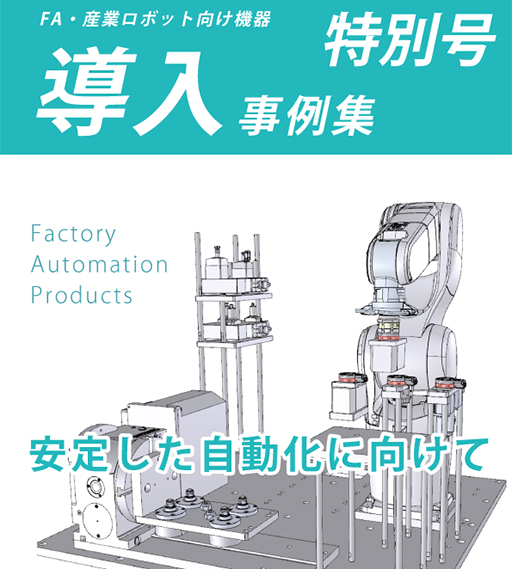
ロボット導入事例
《Webセミナー無料》
超多品種少量生産現場の改革へ!
「労働力不足を補う自動化」「不良の発生しない安定した生産性の向上」をロボット導入事例とともにご紹介します。
-
開催日時【セッション1】日程A
7月15日(水) 15:00〜15:20
受付終了しました -
開催日時【セッション1】日程B
7月17日(金) 15:00〜15:20
受付終了しました -
開催日時【セッション1】日程C
7月1日~3日
受付終了しました


 お問い合わせ
お問い合わせ