事例紹介・動画
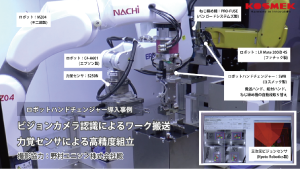
ロボットハンドチェンジャー導入事例 ビジョンカメラ認識によるワーク搬送 力覚センサによる高精度組立
3台のロボットが、ハンドチェンジしながら、組立作業を行います。
ロボットハンドチェンジャーにより、搬送ハンド・組付ハンド・ねじ締め機を自動で交換。
三次元ビジョンセンサにより、ばら積みワークを認識します。
力覚センサにより、高精度の嵌め合いでもピンをブロックの穴に挿入可能です。
ねじ締め機により、ワークのねじ締めを行います。
(撮影協力:野村ユニソン株式会社殿)
(ロボット:MZ04 不二越製、C4-A601 エプソン製、LR Mate 200iD 4S ファナック製)